
 French
French Deutsch
DeutschМеханізм — Вікіпедія
| Механізм | |
 | |
| |
Механі́зм (грец. μηχανή mechané — машина) — система тіл (механічна система), що призначена для перетворення руху одного або декількох тіл у потрібний рух інших тіл. Механізм складає основу більшості машин і застосовується в різноманітних технічних об'єктах.
Основні поняття[ред. | ред. код]
Деталь або сукупність деталей, що не мають рухливості одна відносно одної у машині або механізмі і рухається як одне ціле, називається ланкою. Сполучення дотичних ланок, котре допускає їх відносний рух, називають кінематичною парою. Найпоширеніші кінематичні пари: обертальна (циліндричний шарнір), поступальна (повзун чи напрямна), гвинтова (гвинт і гайка), сферична (кульовий шарнір). На рисунках зображені умовні 3D позначення типових кінематичних пар для побудови просторових принципових кінематичних схем механізмів за ISO 3952[1].
-
 Обертальна пара (циліндричний шарнір)
Обертальна пара (циліндричний шарнір) -
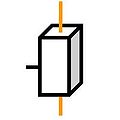 Поступальна пара (напрямна)
Поступальна пара (напрямна) -
 Гвинтова пара
Гвинтова пара -
 Сферичний шарнір
Сферичний шарнір




Якщо в перетворенні руху беруть участь рідкі або газоподібні тіла, то механізм називають гідравлічним або пневматичним. Механізм застосовується в тих випадках, коли неможливо отримати безпосередньо потрібний вид руху тіл і виникає необхідність у перетворенні руху.
При побудові механізма ланки сполучаються у кінематичні ланцюги. Іншими словами, механізм — це кінематичний ланцюг, до складу якого входить нерухома ланка (стійка або корпус), число ступенів свободи котрого дорівнює числу узагальнених координат, що характеризують положення ланцюга відносно стійки. Рух ланок механізма розглядається по відношенню до нерухомої ланки — стійки (корпуса). Ті ланки, які з'єднуються із стійкою, утворюючи кінематичні пари п'ятого класу, передають на неї зусилля і називаються основними ланками. З числа останніх виділяють вхідні ланки, закон руху яких є заданим.
При зображенні механізма на кресленні розрізняють його структурну схему із використанням умовних позначень ланок і пар (без вказання їх розмірів) і принципову кінематичну схему з використанням умовних позначень із вказанням розмірів чи інших параметрів, необхідних для кінематичного розрахунку. На схемах ланки позначають цифрами, а пари і окремі точки ланок — буквами (із вказанням числа ступенів рухомості). Очевидно, що кінематична схема механізма не зображає його дійсної конструкції, а може бути використана лише для кінематичного чи динамічного дослідження.
Класифікація механізмів[ред. | ред. код]

Найпоширеніші механізми з нижчими парами — важільні, клинові і гвинтові; з вищими парами — кулачкові, зубчасті, фрикційні, мальтійські і храпові.
Механізм, що призначений для перетворення обертових чи прямолінійних рухів в обертові (і навпаки), називається механічною передачею. У залежності від виду ланок розрізняють зубчасті, важільні, фрикційні, ланцюгові, пасові передачі. Сюди ж відносяться гідро- і пневмопередачі.
Механізм, що служить для відтворення руху деякої точки по заданій траєкторії, називається напрямним. Найпоширенішими є механізми, що відтворюють рух вздовж прямої лінії (зворотно-поступальний рух) чи по дузі кола (зворотно-коливний або обертовий рухи).
Механізм характеризується числом ступенів свободи — мінімальною кількістю його точок, кінематичні характеристики яких (траєкторії і швидкості руху) однозначно визначають траєкторії і швидкості всіх решти точок механізма. Так, для механізма з одним ступенем свободи можна знайти одну точку, задана траєкторія і швидкість котрої однозначно визначають траєкторії і швидкості руху усіх інших його точок. Для механізма з двома ступенями свободи таких точок повинно бути дві.
Механізм, усі точки якого описують траєкторії, що лежать в паралельних між собою площинах, називається плоским. Рух твердого тіла, у якому усі його точки описують траєкторії, паралельні до однієї площини, називається також плоским.
Рухомість механізма[ред. | ред. код]
У теорії машин і механізмів наводяться загальні закономірності у побудові структури механізмів, що пов'язують число ступенів рухомості W механізма з числом ланок і числом і видом кінематичних пар, з яких він утворений. Ці закономірності носять назву структурних формул механізмів.
Під числом ступенів рухомості механізма W мається на увазі число незалежних параметрів, що визначають положення усіх рухомих ланок механізма.
Формула А. П. Малишева для просторових механізмів[ред. | ред. код]
Нехай кінематичний ланцюг механізма містить n ланок. До того як вони були сполучені за допомогою кінематичних пар, система з n ланок мала 6n ступенів свободи. Кожна кінематична пара m класу дає m рівнянь в'язей відносно координат. Різницю між числом ступенів свободи і числом рівнянь в'язей дає число незалежних координат — ступенів рухомості W механізма:
- .

де n — число рухомих ланок;
- 6n — загальне число ступенів свободи усіх ланок;
- — число кінематичних пар від 1 до 5 класу;
- q — кількість надлишкових (повторних) в'язей, котрі дублюють інші в'язі, не зменшуючи рухливості механізму, а тільки перетворюють його в статично невизначну систему.

Формула П. Л. Чебишова для плоских механізмів[ред. | ред. код]
У випадку плоского механізма для визначення ступеня рухомості використовується формула П. Л. Чебишова :

де n — число рухомих ланок
- — кінематичні пари з однією і з двома ступенями рухливості.

По-іншому цю формулу можна записати в такому вигляді:

де n — загальне число рухомих ланок механізму;
- — число нижчих кінематичних пар;
- — число вищих кінематичних пар.


Див. також[ред. | ред. код]
- Принципова кінематична схема
- Гідравлічний механізм
- Кривошипний механізм
- Прості механізми
- Виконавчий механізм
- Чотириланковий механізм
Примітки[ред. | ред. код]
- ↑ ISO 3952 Kinematic diagrams — Graphical symbols (ДСТУ EN ISO 3952-Х:2018 Кінематичні схеми. Графічні умовні познаки)
Література[ред. | ред. код]
- Бучинський М. Я., Горик О. В., Чернявський А. М., Яхін С. В. Основи творення машин / За редакцією О. В. Горика, доктора технічних наук, професора, заслуженого працівника народної освіти України. — Харків: Вид-во «НТМТ», 2017. — 448 с. — ISBN 978-966-2989-39-7.
- Мала гірнича енциклопедія : у 3 т. / за ред. В. С. Білецького. — Д. : Донбас, 2007. — Т. 2 : Л — Р. — 670 с. — ISBN 57740-0828-2.
- Артоболевский И. И. Теория машин и механизмов. — М.: Наука, 1988. (рос.)
- ДСТУ ГОСТ 2.703:2014. ЄСКД. Правила виконання кінематичних схем (ГОСТ 2.703-2011, IDT)
- Попов С. В., Бучинський М. Я., Гнітько С. М., Чернявський А. М. Теорія механізмів технологічних машин: підручник для студентів механічних спеціальностей закладів вищої освіти. — Харків: НТМТ, 2019. — 268 с.
- Павлище В. Основи конструювання та розрахунок деталей машин: Підручник. — Львів: Афіша, 2003. — 560 с.
- Корець М. С. Основи машинознавства: навч. посібник / М. С. Корець, А. М. Тарара, І. Г. Трегуб. — К., 2001. — 144 с.
- Дворников Л. И. Основы всеобщей (универсальной) класификации механизмов [Архівовано 17 червня 2012 у Wayback Machine.] (рос.)