
 French
French Deutsch
DeutschMars Global Surveyor – Wikipédia, a enciclopédia livre
| Mars Global Surveyor | |
|---|---|
 Renderização artística da sonda em órbita de Marte. | |
| Tipo | Orbitador |
| Operador(es) | |
| Identificação NSSDC | 1996-062A |
| Identificação SATCAT | 24648 |
| Website | mars.jpl.nasa.gov/mgs |
| Duração da missão | 9 anos, 11 meses e 26 dias |
| Propriedades | |
| Massa | 1 030,5 kg |
| Potência elétrica | 980,0 watts |
| Geração de energia | Painéis solares fotovoltaicos |
| Missão | |
| Contratante(s) | |
| Data de lançamento | 07 de novembro de 1996, 17h00 UTC |
| Veículo de lançamento | Delta II 7925 |
| Local de lançamento | |
| Destino | Marte |
| Data de inserção orbital | 12 de setembro de 1997, 01h17 UTC |
| Fim da missão | 02 de novembro de 2006 |
| Especificações orbitais | |
| Referência orbital | Areocêntrica |
| Excentricidade orbital | 0,7126 |
| Periastro | 171,4 km |
| Apoastro | 17 836 km |
| Inclinação orbital | 93º |
| Período orbital | 11,64 horas |
| Época | 02 de novembro de 2006 |
Mars Global Surveyor foi uma sonda espacial orbitadora estadunidense, destinada a explorar o planeta Marte. Desenvolvida e operada pela NASA e pela Jet Propulsion Laboratory, foi lançada em 07 de novembro de 1996 através de um foguete lançador Delta II a partir da Estação da Força Aérea de Cabo Canaveral, Flórida. A Mars Global Surveyor foi uma missão de mapeamento global que examinou todo o planeta, desde a sua ionosfera, passando através de sua atmosfera, até a sua superfície.[1]
Como parte do programa de exploração de Marte, a Mars Global Surveyor auxiliou outras sondas orbitadoras durante fases de aerofrenagem, além de auxiliar os rovers da missão Mars Exploration Rovers, identificando potenciais locais de aterrissagem e retransmitindo seus dados.[1]
A sonda completou sua missão inicial em janeiro de 2001, e durante a terceira fase de sua missão prorrogada, parou de responder as mensagens e comandos em 02 de novembro de 2006.[2][3] Três dias depois, um fraco sinal foi detectado, indicando que a sonda havia entrado em modo de segurança. Após fracassadas tentativas de resolver o problema e retomar o controle da sonda, a NASA encerrou oficialmente a missão em janeiro de 2007.
Objetivos[editar | editar código-fonte]
Durante sua missão principal, a sonda alcançou os seguintes objetivos:[4][2]
- Caracterizou as características superficiais e os processos geológicos de Marte;
- Determinou a composição, distribuição e propriedades físicas dos minerais da superfície, rochas e gelo;
- Determinou a topografia global, a forma do planeta e seu campo gravitacional;
- Estabeleceu a natureza do campo magnético e mapear o campo remanescente da crosta;
- Monitorou o clima global e a estrutura térmica da atmosfera;
- Estudou as interações entre a superfície de Marte e a atmosfera, monitorando as características da superfície, as calotas polares que se expandem e retrocedem, o balanço de energia polar, a poeira e as nuvens à medida que migram ao longo de um ciclo sazonal.
Durante sua missão prorrogada, a sonda também alcançou os seguintes objetivos:[4][2]
- Monitoramento contínuo do clima para formar um conjunto contínuo de observações com a Mars Reconnaissance Orbiter da NASA, que opera em Marte desde março de 2006;
- Imagens de possíveis locais de pouso para o aterrissador Phoenix, em 2008, e para o rover Curiosity, em 2012;
- Observação e análise de sítios-chave de interesse científico, tais como sítios de afloramento de rochas sedimentares;
- Monitoramento contínuo das mudanças na superfície devido ao vento e ao gelo.
Especificações[editar | editar código-fonte]
A sonda foi fabricada na fábrica da Lockheed Martin Astronautics em Denver. A Surveyor possuía o formato semelhante a uma caixa de forma retangular, com seus painéis solares fotovoltaicos que se estendiam de dois lados opostos dessa caixa. Quando totalmente carregada com propelente no momento do lançamento, a espaçonave pesava aproximadamente 1 060 kg.
A maior parte da massa da sonda estava no módulo em forma de caixa que ocupava a parte central da espaçonave. Este módulo central era composto de outros dois módulos retangulares menores, empilhados um sobre o outro, sendo um deles denominado de "módulo de equipamentos", e alojava a parte eletrônica da sonda, seus instrumentos científicos, e o computador de bordo MIL-STD-1750A. O outro módulo, chamado de "módulo de propulsão", alojava os propulsores e os tanques de propelente.
Para o desenvolvimento e construção da sonda, foram gastos US$ 154 milhões, para o lançamento mais US$ 65 milhões, e paras as operações em terra e análise de dados foram gastos mais US$ 20 milhões por ano.[2]
Instrumentos científicos[editar | editar código-fonte]
A sonda contava com cinco instrumentos científicos, eram estes:
- Mars Orbiter Camera (MOC): uma câmera para fotografar imagens em alta resolução da superfície do planeta;
- Mars Orbiter Laser Altimeter (MOLA): um altímetro a laser;
- Thermal Emission Spectrometer (TES): um espectômetro de emissões térmicas;
- MAG/ER: um magnetômetro e um refletômetro eletrônico;
- Ultrastable Oscillator (USO/RS): um oscilador ultra-estável para medições do efeito Doppler;
- Mars Relay (MR): uma antena para retransmitir dados.
A câmera Mars Orbiter Camera (MOC) possuía três configurações:
- A de ângulo estreito, que fotografava imagens em preto e branco de alta resolução (geralmente de 1,5 a 12 metros por pixel);
- A de ângulo maior, que fotografava imagens vermelhas e azuis para o contexto (240 metros por pixel) e imagens globais diárias (7,5 km por pixel).
Mars Orbiter Camera[editar | editar código-fonte]
A MOC registrou mais de 240 mil imagens abrangendo porções de 4,8 anos marcianos, de setembro de 1997 e novembro de 2006. Uma imagem de alta resolução da MOC cobria uma distância de 1,5 ou 3,1 km de comprimento. Muitas vezes, uma imagem era menor que este tamanho pois era recortada para exibir apenas uma determinada área. As imagens de alta resolução podiam cobrir características de 3 a 10 km de comprimento. Quando uma imagem de alta resolução era registrada, uma imagem de contexto também era registrada. A imagem de contexto exibia os rastros da imagem de alta resolução. Imagens de contexto possuíam tipicamente 115,2 km² com resolução de 240 metros por pixel.[5]
Mars Relay[editar | editar código-fonte]
A antena Mars Relay auxiliou os rovers da missão Mars Exploration Rovers para retransmissão de dados de volta à Terra em conjunto com o buffer de memória de 12 MB da Mars Orbiter Camera. No total, mais de 7,6 gigabits de dados foram transferidos dessa forma.
Lançamento e inserção orbital[editar | editar código-fonte]
A Mars Global Surveyor foi lançada a partir da Estação da Força Aérea de Cabo Canaveral, na Flórida, em 07 de novembro de 1996, a bordo de um foguete Delta II. A sonda percorreu quase 750 milhões de quilômetros ao longo de uma viagem de 300 dias para chegar a Marte em 11 de setembro de 1997.
Ao chegar a Marte, a Surveyor disparou seu propulsor principal em uma queima de 22 minutos para inserção orbital em Marte. Esta manobra reduziu a velocidade da sonda e permitiu que a gravidade do planeta a capturasse em órbita. Inicialmente, a Surveyor entrou em uma órbita elíptica alta com um período orbital de 45 horas. A órbita tinha um perigeu de 262 km acima do hemisfério norte, e um apogeu de 54,026 km acima do hemisfério sul do planeta.
Aerofrenagem[editar | editar código-fonte]
Após a inserção orbital, a Surveyor realizou uma série de mudanças de órbita para reduzir o perigeu de sua órbita para as camadas superiores da atmosfera marciana a uma altitude de cerca de 110 km. Durante cada passagem atmosférica, a sonda tinha sua velocidade reduzida em uma pequena quantidade devido ao arrastro atmosférico. A densidade da atmosfera marciana em tais altitudes é comparativamente baixa, permitindo que este procedimento seja realizado sem danos à sonda. Esta redução de velocidade fez com que a sonda reduzisse o apogeu de sua órbita. A Surveyor utilizou esta técnica de aerofrenagem durante um período de quatro meses para reduzir o apogeu de sua órbita de 54 mil quilômetros, a altitudes próximas dos 450 quilômetros.
Em 11 de outubro de 1997, a equipe de voo realizou uma manobra para elevar a altitude do perigeu para fora da atmosfera marciana. Esta suspensão da aerofrenagem foi realizada porque a pressão de ar da atmosfera causou com que um dos dois painéis solares da sonda dobrassem para trás em uma pequena quantidade. O painel em questão foi ligeiramente danificado logo após o lançamento, em novembro de 1996. A aerofrenagem foi retomada em 07 de novembro, depois que os membros da equipe de voo concluíram que a aerofrenagem era segura, desde que ocorresse a um ritmo mais suave do que o plano original da missão.
Sob o novo plano de missão, a aerofrenagem ocorreu com o perigeu da órbita a uma altitude média de 120 km, em oposição à altitude original de 110 km. Esta altitude ligeiramente mais alta resultou em uma diminuição de 66% em termos da pressão do ar sofrida pela sonda. Durante estes seis meses, a aerofrenagem reduziu o período orbital da sonda para entre 12 e 6 horas.
De maio a novembro de 1998, a aerofrenagem foi temporariamente suspensa para permitir que a órbita de deriva se colocasse na posição adequada em relação ao Sol. Sem este hiato, a sonda iria completar a aerofrenagem com sua órbita na orientação solar errada. A fim de maximizar a eficiência da missão, esses seis meses foram dedicados a coletar o máximo de dados científicos possível. Os dados foram coletados entre duas e quatro vezes ao dia, no perigeu de cada órbita.
Finalmente, de novembro de 1998 a março de 1999, a aerofrenagem continuou e reduziu o apogeu da órbita até 450 km. A essa altura, a Surveyor orbitava Marte uma vez a cada duas horas. A aerofrenagem foi programada para terminar ao mesmo tempo em que a órbita de deriva se colocasse em sua posição apropriada em relação ao Sol. Na orientação desejada para operações de mapeamento, a sonda cruzava o equador do lado do dia às 14h00 (horário local de Marte), movendo-se do sul para o norte. Esta geometria foi selecionada para aumentar a qualidade total do retorno de dados científicos.
Resultados da missão[editar | editar código-fonte]
Mapeamento[editar | editar código-fonte]
A sonda orbitava Marte uma vez a cada 117,65 minutos a uma altitude média de 378 km, em uma órbita polar próxima (inclinação de 93 graus), que é quase perfeitamente circular, movendo-se de do polo sul ao polo norte em apenas uma hora. A altitude foi escolhida para tornar a órbita hélio-síncrona, de modo com que todas as imagens que foram fotografadas pela sonda da mesma área da superfície em diferentes datas fossem fotografadas em condições de iluminação idênticas. Após cada órbita, a sonda orbitava o planeta 28,62 graus para o oeste, pois Marte já havia rotacionado por baixo dela. Com esse efeito, era sempre 14h00 para a sonda, já que ela se movia de um fuso horário para o outro exatamente tão rápido quanto o Sol. Após sete sols e 88 órbitas, a sonda se aproximava de seu trajeto precedente, com um desvio de 59 km a leste. Isto assegurou a eventual cobertura total de toda a superfície.
Em sua missão prolongada, a Surveyor fez muito mais do que estudar o planeta diretamente abaixo dela. Comumente executou manobras de rotações e elevações para adquirir imagens de sua posição no nadir. As manobras de rotação, denominadas de ROTOs (Roll Only Targeting Opportunities), rotacionavam a sonda à esquerda ou à direita da sua posição terrestre para fotografar até 30° do nadir. Era possível que uma manobra de elevação fosse adicionada para compensar o movimento relativo entre a espaçonave e o planeta. Esta era denominada de CPROTO (Compensation Pitch Roll Targeting Opportunity), e permitiu algumas imagens de alta resolução por parte da MOC (Mars Orbiting Camera).
Além disso, a sonda poderia fotografar outras sondas em órbita e as luas de Marte. Em 1998, a imagem número 55 103 da MOC, ganhou destaque por exibir um monólito em Fobos, uma das duas luas de Marte. A imagem posteriormente ganhou o nome de "Monólito de Fobos".
Depois de analisar centenas de imagens de alta resolução da superfície marciana fotografadas pela sonda, uma equipe de pesquisadores descobriu que a meteorização e os ventos do planeta criam formas de relevo, especialmente dunas de areia, notavelmente semelhantes às de alguns desertos na Terra.
Os resultados da missão principal da Mars Global Surveyor (de 1996 até 2001) foram publicados no Journal of Geophysical Research de Michael C. Malin e K. Edgett. Algumas dessas descobertas são:
- Descobriu-se que o planeta possui uma crosta em camadas a profundidades de 10 km ou mais. Para produzir tais camadas, grandes quantidades de material tiveram de ser resistidas, transportadas e depositadas.
-
 Camadas em uma velha cratera na região de Arabia Terra. As camadas podem formar-se dos vulcões, do vento, ou pela deposição sob a água. As crateras à esquerda são crateras em pedestal. Imagem fotografada pela Mars Global Surveyor.
Camadas em uma velha cratera na região de Arabia Terra. As camadas podem formar-se dos vulcões, do vento, ou pela deposição sob a água. As crateras à esquerda são crateras em pedestal. Imagem fotografada pela Mars Global Surveyor. -
 Camadas na cratera encontrada dentro da bacia da Cratera Schiaparelli, região do Quadrângulo de Sinus Sabaeus. Imagem fotografada pela Mars Global Surveyor.
Camadas na cratera encontrada dentro da bacia da Cratera Schiaparelli, região do Quadrângulo de Sinus Sabaeus. Imagem fotografada pela Mars Global Surveyor. -
 Camadas em Monument Valley, Arizona, Estados Unidos. Estas camadas são aceitas como tendo sido formadas, ao menos em parte, pela deposição de água. Uma vez que Marte contém camadas semelhantes, a água permanece como uma das principais causas de camadas em Marte. Imagem fotografada pela Mars Global Surveyor.
Camadas em Monument Valley, Arizona, Estados Unidos. Estas camadas são aceitas como tendo sido formadas, ao menos em parte, pela deposição de água. Uma vez que Marte contém camadas semelhantes, a água permanece como uma das principais causas de camadas em Marte. Imagem fotografada pela Mars Global Surveyor. -
 Pequenos morros e camadas localizadas no Quadrângulo de Aeolis. Imagem fotografada pela Mars Global Surveyor.
Pequenos morros e camadas localizadas no Quadrângulo de Aeolis. Imagem fotografada pela Mars Global Surveyor.




- O hemisfério norte, provavelmente, possui mais crateras que o hemisfério sul, mas as crateras são cobertas, em sua maior parte.
- Muitas características, como crateras de impacto, foram cobertas e, em seguida, descobertas recentemente.
-
 Cratera que foi coberta em outra era e agora está sendo descoberta pela erosão, na região do Quadrângulo de Noachis. Imagem fotografada pela Mars Global Surveyor.
Cratera que foi coberta em outra era e agora está sendo descoberta pela erosão, na região do Quadrângulo de Noachis. Imagem fotografada pela Mars Global Surveyor. -
 Fluxos de lava que já foram cobertos, e agora estão sendo expostos. Imagem fotografada pela Mars Global Surveyor.
Fluxos de lava que já foram cobertos, e agora estão sendo expostos. Imagem fotografada pela Mars Global Surveyor. -
 Cratera que foi coberta em outra era e agora está sendo descoberta pela erosão. Imagem fotografada pela Mars Global Surveyor.
Cratera que foi coberta em outra era e agora está sendo descoberta pela erosão. Imagem fotografada pela Mars Global Surveyor. -
 Um grupo de crateras parcialmente exposto. Região do Quadrângulo de Cebrenia. Imagem fotografada pela Mars Global Surveyor.
Um grupo de crateras parcialmente exposto. Região do Quadrângulo de Cebrenia. Imagem fotografada pela Mars Global Surveyor.




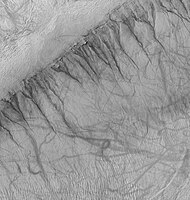
- Foi descoberto que centenas de ravinas foram formadas a partir de água líquida, possível nos últimos tempos.
-
 Grupo de ravinas na parede norte de uma cratera que se encontra a oeste da cratera Newton (41.3047 graus de latitude sul, 192.89 longitude leste), na região do Quadrângulo de Phaethontis. Imagem fotografada pela Mars Global Surveyor.
Grupo de ravinas na parede norte de uma cratera que se encontra a oeste da cratera Newton (41.3047 graus de latitude sul, 192.89 longitude leste), na região do Quadrângulo de Phaethontis. Imagem fotografada pela Mars Global Surveyor. -
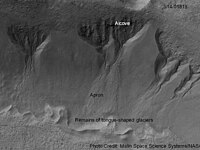
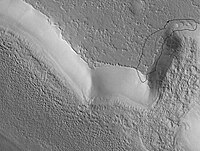
 Ravinas em uma cratera ao norte da cratera Kepler, na região do Quadrângulo de Eridania. Além disso, os recursos que podem ser restos de geleiras antigas estão presentes. Um, à direita, tem a forma de uma língua. Imagem fotografada pela Mars Global Surveyor.
Ravinas em uma cratera ao norte da cratera Kepler, na região do Quadrângulo de Eridania. Além disso, os recursos que podem ser restos de geleiras antigas estão presentes. Um, à direita, tem a forma de uma língua. Imagem fotografada pela Mars Global Surveyor. -
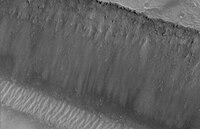
 Ravinas em uma parede da cratera Kaiser, região do Quadrângulo de Noachis. Geralmente, ravinas são encontrados em apenas uma parede de uma cratera. Imagem fotografada pela Mars Global Surveyor.
Ravinas em uma parede da cratera Kaiser, região do Quadrângulo de Noachis. Geralmente, ravinas são encontrados em apenas uma parede de uma cratera. Imagem fotografada pela Mars Global Surveyor. -
 Imagem colorida de ravinas na parede do conjunto de cânions Gorgonum Chaos, na região do Quadrângulo de Phaethontis. Imagem fotografada pela Mars Global Surveyor.
Imagem colorida de ravinas na parede do conjunto de cânions Gorgonum Chaos, na região do Quadrângulo de Phaethontis. Imagem fotografada pela Mars Global Surveyor.




- Grandes áreas de Marte são cobertas por um manto, exceto as encostas mais íngremes. O manto é às vezes liso, às vezes acidentado. Alguns acreditam que os poços são devido ao escape da água através da sublimação (gelo que muda diretamente a um vapor) do gelo enterrado.
-
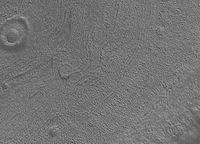 Imagem da superfície do Quadrângulo de Phaethontis. Acredita-se que os poços foram causados pelo gelo enterrado que se transformava em gás. Imagem fotografada pela Mars Global Surveyor.
Imagem da superfície do Quadrângulo de Phaethontis. Acredita-se que os poços foram causados pelo gelo enterrado que se transformava em gás. Imagem fotografada pela Mars Global Surveyor. -
 O manto cobre a maior parte dessa área. Observe a ausência de rochas na face do penhasco. Uma área que mostra as bordas do manto é circundada. Região do Quadrângulo de Ismenius Lacus. Imagem fotografada pela Mars Global Surveyor.
O manto cobre a maior parte dessa área. Observe a ausência de rochas na face do penhasco. Uma área que mostra as bordas do manto é circundada. Região do Quadrângulo de Ismenius Lacus. Imagem fotografada pela Mars Global Surveyor. -
 Material do manto. Imagem fotografada pela Mars Global Surveyor.
Material do manto. Imagem fotografada pela Mars Global Surveyor. -
 Penhasco íngreme com um manto liso cobrindo sua face. Região do Quadrângulo de Ismenius Lacus. Imagem fotografada pela Mars Global Surveyor.
Penhasco íngreme com um manto liso cobrindo sua face. Região do Quadrângulo de Ismenius Lacus. Imagem fotografada pela Mars Global Surveyor.




- Algumas áreas são cobertas por materiais ricos em hematita, que poderia ter sido gerada por água líquida no passado.
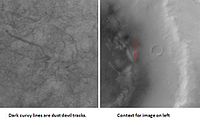
- Rastros escuros foram encontrados, acredita-se que são causados por redemoinhos de poeiras gigantes. Observou-se que os rastros de poeira desses redemoinhos mudaram frequentemente, alguns mudaram em apenas um mês.
-
 Padrão de rastros grandes e pequenos feitos por redemoinhos de poeira gigantes. Região do Quadrângulo de Eridania. Imagem fotografada pela Mars Global Surveyor.
Padrão de rastros grandes e pequenos feitos por redemoinhos de poeira gigantes. Região do Quadrângulo de Eridania. Imagem fotografada pela Mars Global Surveyor. -
 Rastros de redemoinhos de poeira gigantes na cratera Kepler, região do Quadrângulo de Eridania. Imagem fotografada pela Mars Global Surveyor.
Rastros de redemoinhos de poeira gigantes na cratera Kepler, região do Quadrângulo de Eridania. Imagem fotografada pela Mars Global Surveyor. -
 Um redemoinho de poeira gigante. Imagem fotografada pela Mars Global Surveyor.
Um redemoinho de poeira gigante. Imagem fotografada pela Mars Global Surveyor. -
 Um redemoinho de poeira gigante e sua sombra, região do Quadrângulo de Cebrenia. Imagem fotografada pela Mars Global Surveyor.
Um redemoinho de poeira gigante e sua sombra, região do Quadrângulo de Cebrenia. Imagem fotografada pela Mars Global Surveyor.




- A calota residual do polo sul possui uma textura semelhante a um queijo suíço. As crateras possuem alguns metros de profundidade, e ficam maiores a cada ano, indicando que esta região ou o hemisfério do planeta pode estar se aquecendo. As alegações de que isso representa uma tendência global, no entanto, são supressão de evidências de dados regionais contra o conjunto de dados planetário, e resultados da MOC contra os resultados do TES e de dados de rádio.
-
 Mudanças em buracos localizados no pólo sul, em observações de 1999 a 2001. Observe como os buracos cresceram nos dois anos. Imagem fotografada pela Mars Global Surveyor.
Mudanças em buracos localizados no pólo sul, em observações de 1999 a 2001. Observe como os buracos cresceram nos dois anos. Imagem fotografada pela Mars Global Surveyor. -
 Terreno com textura similar ao do queijo suíço. A maior ondulação nessa imagem possui 4 metros de altura. Imagem fotografada pela Mars Global Surveyor.
Terreno com textura similar ao do queijo suíço. A maior ondulação nessa imagem possui 4 metros de altura. Imagem fotografada pela Mars Global Surveyor. -
 Camadas em um terreno. Há uma camada superior brilhante e uma camada inferior mais escura. Imagem fotografada pela Mars Global Surveyor.
Camadas em um terreno. Há uma camada superior brilhante e uma camada inferior mais escura. Imagem fotografada pela Mars Global Surveyor. -
 Buracos em um terreno. O padrão poligonal provavelmente foi formado por depressões rasas. Imagem fotografada pela Mars Global Surveyor.
Buracos em um terreno. O padrão poligonal provavelmente foi formado por depressões rasas. Imagem fotografada pela Mars Global Surveyor.



- Observações do Thermal Emission Spectrometer em infravermelho para estudos atmosféricos e mineralogia, descobriram que o clima planetário de Marte se esfriou desde o programa Viking, e quase toda a superfície de Marte está coberta de rocha vulcânica.
-
 Ceraunius Tholus, um dos muitos vulcões encontrados em Marte. Imagem fotografada pela Mars Global Surveyor.
Ceraunius Tholus, um dos muitos vulcões encontrados em Marte. Imagem fotografada pela Mars Global Surveyor. -
 Fluxos de lava no Quadrângulo de Tharsis. Imagem fotografada pela Mars Global Surveyor.
Fluxos de lava no Quadrângulo de Tharsis. Imagem fotografada pela Mars Global Surveyor. -
 A imagem mostra os fluxos novos e velhos de lava na base do Monte Olimpo. A planície plana é o fluxo mais jovem. O fluxo mais antigo tem canais com diques ao longo de suas bordas. A presença de diques é bastante comum em muitos fluxos de lava. Imagem fotografada pela Mars Global Surveyor.
A imagem mostra os fluxos novos e velhos de lava na base do Monte Olimpo. A planície plana é o fluxo mais jovem. O fluxo mais antigo tem canais com diques ao longo de suas bordas. A presença de diques é bastante comum em muitos fluxos de lava. Imagem fotografada pela Mars Global Surveyor. -
 Pequeno vulcão localizado no Quadrângulo de Phoenicis Lacus. A imagem cobre uma distância de 3,1 km. Imagem fotografada pela Mars Global Surveyor.
Pequeno vulcão localizado no Quadrângulo de Phoenicis Lacus. A imagem cobre uma distância de 3,1 km. Imagem fotografada pela Mars Global Surveyor.




- Centenas de pedras de tamanho natural foram encontradas em algumas áreas. Isso indica que alguns materiais são suficientemente fortes para se manterem juntos, mesmo quando se movem para baixo. A maioria dos pedregulhos apareceu em regiões vulcânicas, então eles foram provavelmente de intemperismo de fluxos de lava.
-
 Pedregulhos de tamanho natural estão espalhados por toda esta imagem. Imagem fotografada pela Mars Global Surveyor.
Pedregulhos de tamanho natural estão espalhados por toda esta imagem. Imagem fotografada pela Mars Global Surveyor. -
 Estas pedras estão perto de Ascraeus Mons, um vulcão marciano. Vulcões em Marte provavelmente formam rochas duras compostas de basalto que é resistente à erosão no ambiente atual de Marte. Imagem fotografada pela Mars Global Surveyor.
Estas pedras estão perto de Ascraeus Mons, um vulcão marciano. Vulcões em Marte provavelmente formam rochas duras compostas de basalto que é resistente à erosão no ambiente atual de Marte. Imagem fotografada pela Mars Global Surveyor.


- Foram observadas milhares de faixas de inclinação escura. A maioria dos cientistas acredita que eles resultam de avalanchas de poeira. No entanto, alguns pesquisadores acreditam que a água pode estar envolvida.
-
 Muitas faixas sofreram mudanças durante os muitos anos que a Surveyor operou. Imagem fotografada pela Mars Global Surveyor.
Muitas faixas sofreram mudanças durante os muitos anos que a Surveyor operou. Imagem fotografada pela Mars Global Surveyor. -
 Faixas escuras localizadas no Quadrângulo de Diacria. Imagem fotografada pela Mars Global Surveyor.
Faixas escuras localizadas no Quadrângulo de Diacria. Imagem fotografada pela Mars Global Surveyor.


Descoberta de água em gelo em Marte[editar | editar código-fonte]
Em 06 de dezembro de 2006 a NASA lançou fotos de duas crateras, em Terra Sirenum e Centauri Montes, que parecem mostrar a presença de água corrente em Marte em algum ponto entre 1999 e 2001.
Centenas de ravinas foram descobertas que foram formadas a partir de água líquida, possível nos últimos tempos. Estas ravinas ocorrem em declives íngremes e principalmente em certas bandas de latitude.
Alguns canais em Marte exibiram canais internos que sugerem fluxos de fluido sustentados. O mais conhecido é o de Nanedi Valles. Outro foi encontrado em Nirgal Vallis.
Perda de contato[editar | editar código-fonte]
Em 02 de novembro de 2006, o centro de controle da missão perdeu o contato com a sonda após comandá-la para ajustar seus painéis solares. Vários dias se passaram antes que um sinal fraco fosse recebido indicando que a espaçonave tinha entrado no modo de segurança e estava aguardando mais instruções.
Em 20 de novembro de 2006, a sonda Mars Reconnaissance Orbiter tentou fotografar a Mars Global Surveyor para verificar a orientação da espaçonave. O esforço foi malsucedido.
Em 21 e 22 de novembro de 2006, a sonda falhou em retransmitir comunicações ao rover Opportunity na superfície de Marte. Em resposta a esta complicação, Fuk Li, o gerente da missão Mars Exploration Program, declarou:
"Realisticamente, nós estamos contando com as prováveis possibilidades da comunicação com a sonda ser restabelecida, e nós estamos enfrentando a probabilidade de que o incrível fluxo de observações científicas da Mars Global Surveyor é longo."
Em 13 de abril de 2007, a NASA anunciou que a perda de contato foi causada por uma falha em uma atualização de parâmetros para o software do sistema da sonda. A Surveyor foi projetada para armazenar duas cópias idênticas do software do sistema para redundância e verificação de erros. As atualizações subsequentes ao software encontraram um erro humano quando dois operadores independentes atualizaram cópias separadas com diferentes parâmetros. Isto foi seguido por uma atualização corretiva que inadvertidamente incluiu uma falha de memória que resultou na perda da sonda.
- "Anteriormente, em novembro de 2005, dois operadores tinham mudado sem saber, o mesmo parâmetro em cópias separadas do software do sistema. Cada operador tinha usado uma precisão ligeiramente diferente ao inserir um parâmetro, o que resultou em uma diferença pequena mas significativa nas duas cópias. Uma leitura posterior da memória revelou essa inconsistência para a equipe da missão.
- Para corrigir o erro, uma atualização foi elaborada em junho de 2006. No entanto, dois endereços de memória foram manipulados incorretamente na atualização, o que poderia permitir que os valores sejam escritos nos endereços de memória incorretos e que geraria complicações adicionais a missão. Cinco meses mais tarde, os endereços de memória problemáticos foram solicitados, o que resultou nos painéis solares imóveis. A complicação levou a sonda a diagnosticar incorretamente uma falha de um motor de redirecionamento, fazendo com que a espaçonave girasse para permitir que os painéis solares imóveis apontassem para o Sol. No entanto, nesta posição, a bateria utilizável restante também foi direcionada para o Sol, resultando no sobreaquecimento da bateria e eventualmente falhando. A nave espacial subsequentemente entrou em modo de segurança e o contato com a espaçonave foi perdido."
Originalmente, a sonda estava destinada a observar Marte durante um ano marciano (aproximadamente 2 anos terrestres). No entanto, com base na vasta quantidade de dados científicos valiosos retornados, a NASA estendeu a missão três vezes. A Surveyor permanece em uma órbita circular quase-polar estável em aproximadamente 450 km de altitude, e colidirá com a superfície do planeta aproximadamente no ano de 2047.
Galeria de imagens[editar | editar código-fonte]
-
 Imagem de possíveis gêiseres de dióxido de carbono, fotografados pela Mars Global Surveyor em 16 de outubro de 2000.
Imagem de possíveis gêiseres de dióxido de carbono, fotografados pela Mars Global Surveyor em 16 de outubro de 2000. -
 Superfície de Marte. Imagem fotografada pela Mars Global Surveyor.
Superfície de Marte. Imagem fotografada pela Mars Global Surveyor. -
 Superfície de Marte. Imagem fotografada pela Mars Global Surveyor.
Superfície de Marte. Imagem fotografada pela Mars Global Surveyor. -
 Superfície de Marte, 10 de agosto de 1999. Imagem fotografada pela Mars Global Surveyor.
Superfície de Marte, 10 de agosto de 1999. Imagem fotografada pela Mars Global Surveyor. -
 Paraquedas, aterrissador, trilhas e o rover Spirit. Imagem fotografada pela Mars Global Surveyor.
Paraquedas, aterrissador, trilhas e o rover Spirit. Imagem fotografada pela Mars Global Surveyor. -

-

-
 A imagem provavelmente é de um delta que se formou em um lago enorme. A área é de grande interesse para os geólogos. Evidências da vida microbiana do passado podem ser encontradas neste local. Imagem fotografada pela Mars Global Surveyor.
A imagem provavelmente é de um delta que se formou em um lago enorme. A área é de grande interesse para os geólogos. Evidências da vida microbiana do passado podem ser encontradas neste local. Imagem fotografada pela Mars Global Surveyor. -
 Imagem do vulcão Pavonis Mons, região do Quadrângulo de Tharsis. Imagem fotografada pela Mars Global Surveyor.
Imagem do vulcão Pavonis Mons, região do Quadrângulo de Tharsis. Imagem fotografada pela Mars Global Surveyor. -
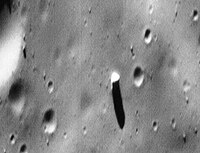 O Monólito de Fobos (direita, ao centro), fotografada pela Mars Global Surveyor (MOC Image 55103) em 1998. Imagem fotografada pela Mars Global Surveyor.
O Monólito de Fobos (direita, ao centro), fotografada pela Mars Global Surveyor (MOC Image 55103) em 1998. Imagem fotografada pela Mars Global Surveyor. -











.jpg)
Ver também[editar | editar código-fonte]
- 2001 Mars Odyssey
- MAVEN
- Mars Express
- Mars Orbiter Mission
- Mars Reconnaissance Orbiter
- Exploração de Marte
Referências
- ↑ a b «Mars Global Surveyor: Science». mars.jpl.nasa.gov. Consultado em 5 de abril de 2017
- ↑ a b c d «NASA - NSSDCA - Spacecraft - Details». nssdc.gsfc.nasa.gov. Consultado em 5 de abril de 2017
- ↑ «Mars Global Surveyor: A New Generation of Space Probes». Space.com
- ↑ a b «Mars Global Surveyor: Science». mars.jpl.nasa.gov. Consultado em 5 de abril de 2017
- ↑ «Malin Space Science Systems - Mars Global Surveyor (MGS) Mars Orbiter Camera (MOC)». www.msss.com. Consultado em 5 de abril de 2017
Ligações externas[editar | editar código-fonte]
| Sobrevoos |  | |
|---|---|---|
| Orbitadores | Mariner 9 · Marte 2 · Marte 3 · Marte 5 (falha) · Marte 6 (falha) · Viking 1 · Viking 2 · Phobos 2 (falha) · Mars Global Surveyor · 2001 Mars Odyssey · Mars Express · Mars Reconnaissance Orbiter · Mars Orbiter Mission · MAVEN · ExoMars Trace Gas Orbiter | |
| Aterissadores e Rovers | Marte 3 (falha) · Viking 1 · Viking 2 · Mars Pathfinder · Mars Exploration Rovers (Spirit · Opportunity) · Phoenix · Mars Science Laboratory (Curiosity) · Schiaparelli (falha) | |
| Missões no futuro | ||
| Ver também | ||
(Negrito itálico: Missões ativas) | ||