
 French
French Deutsch
DeutschMars Polar Lander — Wikipédia
Sonde spatiale

| Organisation | |
|---|---|
| Constructeur | |
| Programme | Mars Surveyor |
| Domaine | Étude de la calotte polaire sud de Mars |
| Type de mission | Atterrisseur |
| Statut | Échec |
| Autres noms | Mars Surveyor '98 Lander |
| Lancement | (20 h 21 UTC) |
| Lanceur | Delta II 7425 |
| Fin de mission | |
| Identifiant COSPAR | 1999-001A |
| Site | Site du MPL JPL |
| Masse au lancement | 576 kg Atterrisseur : 290 kg |
|---|---|
| Ergols | Hydrazine |
| Masse ergols | 64 kg |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 200 W (atterrisseur) |
| MARDI | Caméra de descente |
|---|---|
| SSI | Caméra panoramique |
| LIDAR | Lidar |
| MET | Station météorologique |
| TEGA | Analyseur de gaz |
| RAC | Caméra du bras robotique |
| Deep Space 2 | Pénétrateurs |
Mars Polar Lander (Mars Surveyor '98 Lander) est une des deux sondes spatiales de l'agence spatiale américaine, la NASA, lancée en 1998 pour étudier la planète Mars. Cet atterrisseur (engin ne disposant d'aucune mobilité) doit se poser près du pôle sud martien en bordure de la calotte constituée essentiellement de glace de dioxyde de carbone. L'objectif de la mission qui doit durer les trois mois de l'été martien est de réaliser des photos du site d'atterrissage dans plusieurs longueurs d'onde pour identifier la nature du sol, creuser des tranchées pour étudier les couches superficielles du sol, analyser des échantillons du sol pour déterminer la présence d'eau, de glace ou d'autres minéraux hydratés reflet du climat passé, effectuer des mesures continues du vent, de la température, de l'humidité et de la pression au niveau du site, détecter des formations nuageuses ou brumeuses dans le ciel et observer les dépôts de givre et de neige sur le sol martien.
Mars Polar Lander est développée en appliquant la politique du « better, faster, cheaper » (mieux, plus vite, moins cher) lancée par l'administrateur de la NASA Daniel Goldin qui veut mettre fin aux programmes d'exploration du système solaire coûteux et s'étalant sur plusieurs décennies. Mars Polar Lander est la troisième mission du programme Mars Surveyor qui est la déclinaison martienne de cette nouvelle politique. Le coût total de la mission est de 120 millions US$ dans le lanceur. La masse au lancement de la sonde spatiale est de 576 kilogrammes et elle emporte un nombre réduit d'instruments scientifiques. La sonde spatiale transporte également deux pénétrateurs Deep Space 2) expérimentaux qui doivent, après avoir été largués avant la rentrée atmosphérique, s'enfoncer dans le sol à grande vitesse et collecter des données sur celui-ci.
La sonde spatiale est lancée le par une fusée Delta II 7425. Après un transit entre la Terre et Mars d'une durée de 11 mois, elle pénètre dans l'atmosphère de la planète le . Les ingénieurs de la NASA perdent tout contact avec Mars Polar Lander qui s'écrase sans doute sur le sol de la planète. La commission d'enquête créée par la NASA met en évidence plusieurs causes possibles sans certitude faute de disposer de télémesures. La piste la plus sérieuse est un arrêt prématuré des rétrofusées dans la phase finale de l'atterrissage. L'anomalie serait due à une erreur de conception du logiciel pilotant l'atterrisseur. Les pénétrateurs sont également perdus à la suite de défaillances indépendantes. Ces échecs venant quelques mois après celui de la sonde spatiale Mars Climate Orbiter secouent fortement l'agence spatiale américaine. Ils sonnent l'arrêt du programme Mars Surveyor qui prévoyait le lancement de deux missions martiennes à bas coût tous les deux ans (à chaque ouverture d'une fenêtre de lancement vers Mars). Mais ils ne remettent pas en cause la politique des missions à coût modéré qui se poursuivra par la suite avec de grands succès. La mission de Mars Polar Lander sera remplie en 2007 par un quasi clone de MPL, Phoenix. InSight, une mission lancée en 2018, utilisera une plateforme pratiquement identique.
Contexte[modifier | modifier le code]
Depuis le début de l'exploration spatiale, la planète Mars constitue l'objectif favori des missions d'exploration du système solaire[1]. Contrairement aux autres planètes du Système solaire, Mars a sans aucun doute connu par le passé des conditions assez proches de celles régnant sur Terre qui ont pu, mais cela reste à confirmer, permettre l'apparition de la vie. Mars conserve encore actuellement une atmosphère ainsi que de l'eau à sa surface et sa proximité permet d'y envoyer relativement facilement des sondes spatiales. Mars constitue également une destination incontournable si les agences spatiales parviennent à développer un programme spatial habité ambitieux et, dans cette perspective, il est nécessaire d'effectuer des missions de reconnaissance.
Le premier engin humain à s'être posé en douceur sur Mars est l'atterrisseur soviétique Mars 3, le , mais le contact avec la sonde est perdu seulement 20 secondes après l'atterrissage. Cette défaillance est attribuée à une tempête de poussière martienne. Le premier succès d'un atterrisseur martien vient le , avec l'atterrissage réussi de la mission américaine Viking, dont les deux atterrisseurs transmettront des photographies en couleur et des données scientifiques durant plus de 6 ans.
Le programme Mars Surveyor : des missions martiennes à faible coût[modifier | modifier le code]


La NASA lance, en 1992, la mission Mars Observer alors qu'il s'est écoulé dix-sept ans depuis le programme américain Viking et sa dernière mission Viking 2. Mais trois jours avant la date prévue pour l'insertion sur son orbite martienne, le contact avec la sonde spatiale est perdu. Mars Observer est la sonde la plus coûteuse lancée par la NASA et elle est perdue avant d'avoir accompli sa mission (813 millions de dollars de l'époque). Cet échec entraîne une révision de la stratégie d'exploration planétaire américaine : celle-ci doit désormais permettre d'envoyer davantage de sondes à budget serré de manière à ne pas tout perdre en cas d'échec. C'est le « better, faster, cheaper » qui devient la devise du nouveau programme Mars Surveyor. Dans le cadre de ce programme à chaque conjonction favorable de Mars et de la Terre (soit environ tous les deux ans), la NASA prévoit d'envoyer à la fois une sonde spatiale de type orbiteur, qui doit effectuer ses observations depuis l'orbite martienne, et une autre de type atterrisseur, chargée de se poser sur le sol martien pour y recueillir des données scientifiques. À la recherche d'économies d'échelle, la NASA passe en 1995 un accord avec Lockheed Martin Astronautics à Denver dans le Colorado pour la construction de ces sondes spatiales à bas coût. Les deux premières sondes sont lancées en 1996 et remplissent leur mission avec succès : l'atterrisseur Mars Pathfinder (exclu de l'accord avec Lockheed) se pose sur Mars et libère le premier robot mobile extraplanétaire, Sojourner, qui explore les environs durant quelques semaines ; l'orbiteur Mars Global Surveyor renvoie durant neuf ans une quantité inégalée de données sur l'atmosphère, la surface et la structure interne de Mars.
Les deux sondes Mars Surveyor 98[modifier | modifier le code]
Conformément à ses plans, la NASA développe pour un lancement en 1998 deux nouvelles sondes spatiales : Mars Climate Orbiter et Mars Polar Lander. Mars Climate Orbiter doit embarquer deux des instruments détruits avec la sonde Mars Observer et jouer le rôle de station météorologique martienne. Mars Polar Lander est chargé des opérations en surface. Depuis le début de l'exploration de Mars par des engins spatiaux, il est le premier dont l'objectif est de se poser aux latitudes élevées dans les régions proches du pôle pour y étudier le cycle de l'eau et du dioxyde de carbone. Le coût de la mission pour les deux sondes spatiales de 1998 est évalué à 327,6 millions US$ 98, dont 193 millions pour leur développement, 91,7 millions pour leur lancement et 42,8 millions pour les opérations en cours de mission. Le coût de Mars Polar Lander seul est de 110 millions US$ pour le développement auquel s'ajoutent le coût du lanceur, la gestion de la phase opérationnelle (10 millions US$)[2]. , et le développement des sondes Deep Space 2 (29,7 millions US$)[3].
Les objectifs de la mission Mars Polar Lander[modifier | modifier le code]
La mission Mars Polar Lander poursuit trois objectifs majeurs avec pour sujet commun la présence d'eau sur la planète Mars[4] :
- trouver des preuves de vie actuelle ou ancienne ;
- étudier les processus climatiques ainsi que l'histoire du climat martien ;
- préparer l'exploration humaine de la planète rouge.
Pour remplir ces objectifs Mars Polar Lander doit remplir les taches suivantes[4] :
- Prendre des photos durant la descente vers le sol de la zone d'atterrissage pour permettre de les corréler avec photos prises par ailleurs depuis l'orbite ou après l'atterrissage ;
- Réaliser des photos en couleur du site d’atterrissage pour déterminer la nature du sol et les minéraux qui la compose ;
- Creuser quelques millimètres sous la surface pour étudier les couches superficielles qui se déposent chaque année ;
- Analyser les échantillons de sol afin de détecter la présence d'eau, de glace, d'hydrates ou d'autres d minéraux hydratés témoins de l'ancien climat de la planète ;
- Effectuer des mesures du vent, de la température, de l'humidité et de la pression sur le site d’atterrissage ;
- Détecter la présence de brouillard de glace, la formation et la dissipation de givre et de neige à la surface.
Site d'atterrissage[modifier | modifier le code]

Mars dispose de deux calottes polaires : au nord la calotte permanente est constituée majoritairement de glace d'eau tandis qu'au sud elle est principalement constituée de glace de dioxyde de carbone avec peut-être un peu de glace d'eau. Durant chaque hiver le diamètre des deux calottes croit : la calotte du pôle sud croit de manière plus importante car l'hiver dans cette région se situe au moment où Mars se situe à l'apogée de son orbite autour du Soleil. Les deux calottes sont constituées de couches alternées de sol se différenciant par la proportion de glace et de poussière. Ces strates, analogues aux anneaux de croissance des arbres, pourraient fournir des indices importants sur le climat passé de la planète. Elles pourraient également permettre de déterminer si des évolutions géologiques récentes ont eu lieu. L'un des objectifs de Mars Polar Lander est de fournir un portrait de ce dôme de glace et de poussière[5].
Les scientifiques ont sélectionné un site situé près du pôle sud sur la calotte permanente constituée de glace et d'eau là ou elle s'étend le plus vers le nord. La zone visée d'une superficie de 4 000 km² est centrée sur la latitude 75° et la longitude 210°. Mars Polar Lander doit se poser durant l'été lorsque la couche saisonnière de glace de dioxyde de carbone s'est évaporée. Les régions polaires de Mars connaissent des températures particulièrement froides. Mais les 90 jours de la mission primaire doivent se dérouler alors que le Soleil est en permanence au-dessus de l'horizon. Les panneaux solaires pourront fournir en permanence l'énergie nécessaire pour faire fonctionner les résistances chauffantes permettant aux équipements les plus délicats (dont les batteries) de résister à des températures plongeant jusqu'à −90 °C[5],[6].
Caractéristiques techniques de la sonde spatiale[modifier | modifier le code]

La sonde spatiale, qui a une masse totale de 576 kg, comprend trois sous-ensembles[7] :
- l'étage de croisière qui prend en charge le transit entre la Terre et Mars et est largué avant la rentrée dans l'atmosphère de Mars (5 dans le schéma 1)
- le bouclier thermique qui protègent l'atterrisseur durant la descente vers le sol de Mars et le parachute qui assure une partie du freinage. Ces deux éléments sont largués avant l'atterrissage (1 et 4 dans le schéma 1)
- l'atterrisseur (350 kg) qui est le seul élément à se poser sur Mars et qui emporte les différents instruments scientifiques représentant une masse de 55 kg (1 et 4 dans le schéma 1).
L'étage de croisière[modifier | modifier le code]
L'étage de croisière de Mars Polar Lander prend en charge le transit entre la Terre et Mars. Il fournit l'énergie nécessaire aux systèmes de vol (ordinateur de bord, moteurs pour les changements de trajectoire, etc.) pendant toute la durée de cette phase. Le cœur de l'étage de croisière est un cylindre court de 95 centimètres de diamètre sur lequel sont fixés deux panneaux solaires de part et d'autre qui portent l'envergure de l'étage de croisière à 3,4 mètres. L'équipement installé comprend des antennes faible et moyen gain, un émetteur radio en bande X, deux capteurs solaires et deux viseurs d'étoiles. Le fonctionnement de l'étage de croisière repose en partie sur des équipements installés dans le bouclier thermique. Ainsi pour corriger sa trajectoire ou modifier son orientation dans l'espace, l'étage de croisière utilise 8 petites moteurs-fusées regroupés par 2 (1 moteur d'une poussée de 4,4 newtons pour le contrôle d'attitude et 1 moteur de 22 newtons pour les corrections de trajectoire) dont les tuyères émergent du bouclier thermique arrière par 4 orifices. De même durant le transit c'est l'ordinateur embarqué de l'atterrisseur qui pilote les opérations. L'étage de croisière est largué sept minutes avant le début de l'entrée dans l'atmosphère martienne. Les deux petits pénétrateurs Deep Space 2 sont fixés sur la partie centrale de l'étage de croisière[8]. L'étage de croisière à une masse de 82 kilogrammes[9].

Le bouclier thermique[modifier | modifier le code]

Le bouclier thermique, qui a une masse de 140 kg assure la protection thermique de l'atterrisseur durant la rentrée atmosphérique lorsque l'étage pénètre à grande vitesse (environ 6 kilomètres par seconde) dans les couches plus épaisses de l'atmosphère martienne et portent la température de la face avant à environ 1 500 °C. Le bouclier thermique est composé de deux éléments, tous deux de forme conique et d'un diamètre de 2,64 mètres : le bouclier avant plus aplati est haut d'environ 60 centimètres. C'est lui subit l'élévation de température la plus élevée. Le bouclier arrière fait environ 1 mètre de haut. Cette coque qui enveloppe l'atterrisseur le protège de la chaleur grâce à un revêtement ablatif de type SLA-561 qui recouvre sa surface en couches plus épaisses sur le bouclier avant plus exposé. Le bouclier arrière inclut les parachutes qui réduisent la vitesse de descente une fois le bouclier thermique avant largué[9].
L'atterrisseur[modifier | modifier le code]

L'atterrisseur emporte la charge utile de la sonde spatiale et est le seul élément de la sonde spatiale à se poser sur le sol de Mars. Sa masse est de 354 kg dont 64 kg d'hydrazine. Il se présente sous la forme d'une plateforme située à 1,06 mètre au-dessus du sol sur lesquels sont fixés les instruments et les équipements de télécommunications. Le plateau repose sur une structure centrale en aluminium. Pour se poser l'engin spatial abandonne la technique des airbags testée avec succès par Mars Pathfinder deux ans plus tôt mais reprend la solution des rétrofusées mise en œuvre 20 ans auparavant par les sondes spatiales Viking : 8 moteurs-fusées d'une poussée unitaire de 266 newtons et brûlant de l'hydrazine réduisent la vitesse dans la dernière phase de la descente vers la surface de Mars. La vitesse résiduelle est amortie par des sections déformables réalisées en nid d'abeilles présentes sur les trois pieds formant le train d'atterrissage. L'atterrisseur comprend quatre panneaux solaires de grande taille groupés par deux de part et d'autre du corps de l'atterrisseur qui sont déployés à la surface et portent alors l'envergure à 3,6 mètres. Leur taille a été fixée par la place disponible sous le bouclier thermique. Il existe par ailleurs deux petits panneaux solaires supplémentaires. Ils fournissent en tout 200 watts à la surface de Mars. Ils alimentent une Batterie nickel-hydrogène d'une capacité de 16 ampères-heures[10],[11].
Les équipements installés sur le plateau supérieur comprennent un antenne UHF hélicoïdale pour transmettre des données aux orbiteurs martiens qui les relaient vers la Terre. Le débit est de 128 kilobits par seconde sur la liaison montante (envoi de données et de télémesures) et de 8 ou 32 kilobits pour la réception de commandes). Une antenne moyen gain parabolique disposant de deux degrés de liberté pour pouvoir être pointée vers la Terre et une antenne faible gain omnidirectionnelle sont utilisées pour transmettre les données en bande X directement avec la Terre avec un débit de 2 kilobits par seconde (liaison montante et descendante). L'avionique est enfermée dans une enceinte isolée thermiquement située sous le plateau. Elle comprend notamment l'ordinateur embarqué qui contrôle les opérations durant l'ensemble de la mission dont le transit vers Mars et la descente sur le sol martien. Cet équipement qui existe à deux exemplaires repose sur un microprocesseur RAD6000 version radiodurcie du PowerPC cadencée à 5, 10 ou 20 megaherz. Les données scientifiques sont stockées dans une mémoire de masse de type mémoire flash et d'une mémoire vive d'une capacité de 74 mégaoctets. Un autre compartiment également situé sous le plateau contient d'autres boitiers électroniques et l'altimètre radar utilisé durant la descente pour contrôler celle-ci. Le radar, qui est une version modifiée de l'altimètre radar du chasseur F-16 fournit la vitesse horizontale et verticale de la sonde spatiale durant la phase finale de sa descente[10],[12],[13].

Instruments scientifiques[modifier | modifier le code]
Pour remplir ces missions, l'atterrisseur embarque à son bord sept instruments scientifiques. Quatre d'entre eux constituent MVACS (Mars Volatiles and Climate Surveyor) c'est-à-dire le groupe d'instruments chargé de réaliser les mesures scientifiques. Il inclut une caméra SSI (Stereo Surface Imager) qui permettra la réalisation de photographies de la surface, un bras robotique (RA) et sa caméra (RAC), destinés à creuser la surface pour étudier la composition du sol et prélevé des échantillons, une station météorologique MET (Meteorological Package) et un mini-laboratoire TEGA (Thermal and Evolved Gas Analyzer) chargé d'étudier les volatiles dont l'eau et le dioxyde de carbone présent dans les échantillons de sol[14]. En plus de ces quatre instruments, l'atterrisseur embarque la caméra MARDI qui effectuera des photographies de la zone d'atterrissage durant la dernière phase de la descente vers la surface ainsi qu'un lidar chargé d'étudier la structure de l'atmosphère surplombant le site où se posera Mars Polar Lander. Le dernier et plus petit de ces instruments est un microphone, le premier appareil de ce genre envoyé sur la surface d'un autre astre.
Le bras robotisé RA[modifier | modifier le code]

Le bras robotisé RA (en anglais Robotic Arm est utilisé pour creuser dans le sol jusqu'à 50 centimètres de profondeur au moyen d'un petit godet fixée à son extrémité, d'y récolter des échantillons et de les transférer vers d'autres instruments en vue d'être analysés. Construit en alliage de titane et d'aluminium il est long de 2,35 mètres, le bras robotique permet à Phoenix et dispose de quatre degrés de liberté grâce à des articulations situées au niveau de l'attache avec l'atterrisseur, du coude situé à mi-longueur et l'extrémité sur lequel est fixé le godet. Des capteurs de température sont fixés au niveau du coude et sur une petite sonde fixée au niveau du godet qui peut être enfoncé dans le sol. Il peut exercer une force de 80 newtons. Il est fourni par le Jet Propulsion Laboratory[15].
La caméra du bras robotisé RAC[modifier | modifier le code]
La caméra du bras robotisé RAC (Robotic Arm Camera) est fournie par l'Université de l'Arizona et l'Institut Max Planck. Montée à l'extrémité du bras elle comprend une multitude de petites LED de couleurs permettant de prendre des images avec un éclairage rouge, bleu ou vert. La lentille était protégée de la poussière par un cache transparent amovible. Cette caméra a réalisé des images des échantillons collectées par la pelle à partir du sol. Elle n'a finalement pas réalisé d'image des parois des tranchées creusées par le bras, ni pu être déplacée à proximité de roches voisines pour examiner leur texture[15].
Caméra stéréo SSI[modifier | modifier le code]

La caméra stéréo SSI (Surface Stereo Imager) dérive d'un instrument emporté par l'atterrisseur Mars Pathfinder. Son capteur a une résolution spatiale de 256x256 pixels. Elle est fixée sur le pont de la sonde spatiale au sommet d'un petit mat vertical qui se déploie grâce à un ressort et place la caméra à environ 1,8 mètre au-dessus de la surface de surface de Mars. Une roue portant 12 filtres permet dans 12 longueurs d'onde allant du violet au proche infrarouge. La caméra est conçue pour prendre des images stéréos de la surface à une distance de 3 mètres, fournir des images permettant d'utiliser les opérations avec le bras robotisé et effectuer des images panoramiques du site d'atterrissage permettant de situer celui-ci sur les photos prises par les orbiteurs Viking et Mars Global Surveyor. La caméra doit être également utilisée pour prendre des images du ciel afin de mesurer la quantité de poussière en suspension et mesurer l'intensité du rayonnement solaire dans une bande spectrale permettant d'évaluer la vapeur d'eau présente à travers le degré d’absorption. Les images doivent être également exploitées pour mesurer la quantité de glace de dioxyde de carbone présente dans l'atmosphère martienne. La caméra est fournie par l'Université de l'Arizona[16],[17].
Laboratoire d'analyse TEGA[modifier | modifier le code]

TEGA (Thermal and Evolved Gas Analyzer c'est-à-dire Analyseur Thermique de Gaz Évolué) est un instrument fourni par l'université de l'Arizona et par l’université du Texas. Il comprend des petits fours et un spectromètre de masse. Il permet d'analyser les échantillons de sol et de glace collectés par le bras robotique. C'est le premier instrument à rechercher de composés organiques dans le sol martien depuis les sondes Viking en 1976. Pour analyser un échantillon de sol le bras robotique creuse une petite tranchée de quelques centimètres dans le sol dans laquelle un échantillon de sol est prélevé. Celui-ci est photographié par la caméra du bras robotique puis déposé dans l'un des 8 fours du TEGA (leur taille est approximativement celle d'une petite cartouche d'encre). Une diode LED permet de confirmer qu'un échantillon de sol a bien été déposé. L'échantillon est alors porté à très haute température (environ 1 000 °C) de manière progressive. Bien qu'alimenté uniquement par des panneaux solaires, le TEGA peut atteindre une telle température, car la masse de l'échantillon à chauffer était très faible (100 milligrammes environ). Lors du chauffage progressif, l'échantillon libère de l'eau et du CO2, ainsi que diverses substances volatiles emprisonnées dans les différents minéraux qu'il contient. L'identification des substances volatiles est effectué grâce à un spectromètre de masse très sensible qui peut mesurer précisément la masse (et donc la nature) ainsi que la concentration des substances libérées au cours du chauffage. Une fois utilisé, un four ne peut plus servir. TEGA joue également le rôle d'un calorimètre, étant donné que l'énergie à fournir pour porter les fours à une certaine température est contrôlée. En tout et pour tout, TEGA doit analyser 8 échantillons de sol[18],[19].
Caméra de descente MARDI[modifier | modifier le code]

La caméra de descente MarDI (Mars Descent Imager), développée par la société californienne par Malin Space Science Systems, doit réaliser des images grand angle (champ de vue de 65,9°) et en couleurs du site d'atterrissage lors de la descente vers la surface martienne. MARDI est mise en marche juste après l'éjection du bouclier thermique à une altitude d'environ 8 kilomètres. La caméra prend initialement des images de la surface couvrant 9 km² avec une résolution spatiale de 7,5 mètres par pixel. La dernière photo doit réaliser une image de 9 m² avec une résolution spatiale de 9 mm/pixel. Il est prévu que la caméra prenne 4 images de l'éjection du bouclier thermique d'une définition de 256×256 pixels, 16 images durant la descente sous parachute avec une définition de 1024×12024 pixels et 10 images durant la phase de descente propulsée finale avec une définition de 800×800 pixels. Le détecteur dispose d'un CCD de 1024×1024 pixels et restitue des images en noir et blanc. la caméra pèse 480 grammes[20],[21],[22].
Station météorologique MET[modifier | modifier le code]
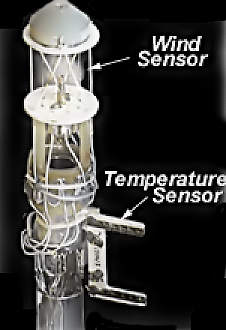
La station météorologique MET (Meteorological Station) développée par le JPL et l'Institut météorologique de Finlande comprend un mat haut de 1,2 mètre sur lequel sont fixés des capteurs mesurant la direction, la vitesse du vent, la température et des lasers permettant de détecter la présence de vapeur d'eau, les isotopes de l'eau et du dioxyde de carbone. Un mât pointant sous le niveau du pont de la sonde spatiale et long de 0,9 mètre comprend un capteur de vent et des capteurs de températures de manière à étudier l'atmosphère à 10-15 centimètres de la surface afin de déterminer à partir de quelle vitesse du vent les tourbillons de poussière se créent[23],[24]. Ces mesures sont complétées avec celles prises par un thermomètre RASTS (Robotic Arm Atmospheric Temperature Sensor) fixé sur le coude du bras robotique qui permet de mesurer la température à une plus ou moins grande hauteur au-dessus du sol et par une sonde STP (Soil Temperature Probe) longue de quelques centimètres fixée au niveau du godet qui peut être enfoncée dans le sol. Celle-ci est graduée pour mesurer le niveau d'enfoncement et elle comprend un capteur qui permet de mesurer la température à quelques centimètres sous la surface[17].
- Instruments scientifiques
-
 Lidar.
Lidar. -
 Caméra RAC fixée sur le bras robotisé.
Caméra RAC fixée sur le bras robotisé. -
 Station météorologique MET.
Station météorologique MET.



Lidar[modifier | modifier le code]

Le lidar analyse la structure de l'atmosphère au-dessus du site d'atterrissage en émettant des impulsions lumineuses en proche infrarouge à l'aide d'un laser utilisant une diode à l'arséniure d'aluminium-gallium au rythme de 2500 pulsions par seconde. Un détecteur analyse le temps mis pour que les photons soient renvoyés par la glace et la poussière présente dans la basse atmosphère (jusqu'à 2-3 kilomètres d'altitude) et en déduit la position et les caractéristiques des concentrations de glace et de poussière présentes. L'instrument est fourni par le laboratoire russe IKI[21],[25].
Microphone[modifier | modifier le code]
Mars Polar Lander est la première sonde spatiale emportant un microphone sur Mars. C'est un instrument de petite taille (5 centimètres de côté et un centimètre d'épaisseur) pesant 50 grammes, réalisé avec des composants disponibles dans le commerce. L'instrument est installé sur le lidar[26], [27].
L'impacteur Deep Space 2[modifier | modifier le code]

La sonde spatiale emporte deux pénétrateurs Deep Space 2 qui doivent être largués cinq minutes avant que la sonde spatiale pénètre dans l'atmosphère. Chacun de ces deux pénétrateurs comprend un bouclier thermique de la taille d'un ballon de basket-ball dans lequel se trouve la sonde proprement dite de la taille d'un ballon de football. Aucun parachute ne freine le pénétrateur. Lorsque celui frappe le sol à une vitesse de 200 mètres par seconde, le bouclier avant éclate et libère sa charge utile. La partie avant du pénétrateur en forme d'obus s'enfonce dans le sol à une profondeur d'environ un mètre tandis la partie arrière reste à la surface et sert de relais de communications avec la Terre via les satellites en orbite autour de Mars. Une petite foreuse située dans la partie avant prélève un échantillon du sol qui est analysé pour déterminer la quantité d'eau présence. Des capteurs mesurent la température du sol. Ces données sont transmises à la Terre. La mission des pénétrateurs doit s'achever environ deux heures après leur arrivée sur le sol martien mais peut être prolongée jusqu'à ce que les batteries qui fournissent l'énergie soient épuisés. Les deux pénétrateurs sont baptisés « Scott » et « Amundsen » en l'honneur des premiers explorateurs à atteindre le pôle sud terrestre Robert Falcon Scott et Roald Amundsen[28].
Déroulement de la mission[modifier | modifier le code]


Lancement et transit vers Mars (3 janvier 1999 - 3 décembre 1999)[modifier | modifier le code]
Mars Polar Lander décolle le à bord d'une fusée Delta II de type 7425 à 20 h 57 UTC dès le premier jour de la fenêtre de lancement. La sonde spatiale est placée sur une orbite de transfert vers Mars de type 2. La sonde spatiale va mettre 11 mois pour atteindre la planète Mars. La sonde se sépare du troisième étage à 21:03 UTC. Plusieurs corrections de trajectoire sont effectuées durant cette phase : le 21 janvier (delta-V de 16 m/s), le 15 mars. La correction du 1er septembre met la sonde spatiale sur une trajectoire qui doit la faire atterrir à 800 kilomètres du pôle sur par 79° de latitude sud et 195° de longitude ouest. Selon les observations effectuées, ce site est constitué de couches alternées de glace et de poussière qui se sont déposées au cours de plusieurs dizaines de millions d'années. Selon les estimations, les rochers ne doivent pas couvrir plus de 10 % de la surface du terrain. L'atterrissage se déroule durant l'été dans la région visée si bien que le Soleil devrait rester au-dessus de l'horizon durant plusieurs mois. Les deux pénétrateurs, qui sont largués avant le début de la rentrée atmosphérique par leur vaisseau porteur doivent s'écraser à environ 60 kilomètres du site d'atterrissage de la sonde spatiale à 10 kilomètres l'un de l'autre. La région visée est une ellipse de 200 × 20 kilomètres centrée sur la latitude 75,3° sud et la longitude 195,°9 Ouest. Dans cette région, la couche de dioxyde de carbone gelée a dû fondre environ 1 mois avant leur arrivée[29].
Une quatrième correction de trajectoire est effectuée le 30 octobre, alors que quelques semaines auparavant la sonde spatiale jumelle, Mars Climate Orbiter, a été déclarée comme perdue. À la suite de cet événement, les ingénieurs passent en revue les problèmes que pourraient rencontrer la sonde spatiale durant la phase délicate de la descente vers le sol de Mars. Ils découvrent que les rétrofusées chargées d'annuler la vitesse de l'atterrisseur immédiatement avant de toucher le sol pourraient ne pas fonctionner comme prévu à cause des températures très basses de Mars. Ils envisagent d'utiliser les résistances chauffantes des réservoirs pour réchauffer les moteurs-fusées adjacents mais le résultat ne semble pas garanti compte tenu des couches d'isolant thermique séparant réservoirs et moteurs-fusées. Le , une nouvelle correction de trajectoire est effectuée pour modifier la vitesse de l'engin spatial de 0,06 m/s. Une dernière correction est effectuée le soit 6,5 heures avant que Mars Polar Lander pénètre dans l'atmosphère martienne. Cinq minutes avant cet événement, l'étage de croisière est largué. À 19h46, la sonde spatiale modifie son orientation pour que son bouclier thermique le plus épais soit orienté vers l'avant. Dans cette nouvelle position, les communications avec la Terre ne sont plus possibles. Dix-huit secondes après sa séparation avec l'étage de descente, l'étage de croisière largue les deux pénétrateurs qui se stabilisent de manière automatique dans une orientation qui place la face la mieux protégée de l'élévation de la température vers l'avant[29].
Rentrée atmosphérique et perte de la sonde spatiale (3 décembre 1999)[modifier | modifier le code]
Les dernières corrections de trajectoire ont permis de placer Mars Polar Lander à l'entrée d'un corridor étroit de 10 × 40 kilomètres dans laquelle la sonde spatiale pénètre à une vitesse de 6,9 km/s. En quelques dizaines de secondes, la sonde freinée par l'atmosphère ralentit à 430 m/s en subissant une décélération de 12 g. À une altitude de 7,3 km, il est prévu que le parachute soit déployé et que le bouclier thermique avant soit largué. La caméra de descente MARDI doit alors commencer à effectuer les premières photos de la surface. Les pieds du train d'atterrissage sont déployés et le radar altimètre est mis en marche à une altitude de 2,5 km. Le parachute et le bouclier thermique arrière sont largués alors que la vitesse de descente verticale n'est plus que de 75 mètres par seconde. Les rétrofusées sont alors mises à feu avec l'objectif de poser l'atterrisseur à une vitesse verticale inférieure à 2,4 m/s[29].
Les dernières données télémétriques de Mars Polar Lander ont été envoyées juste avant l'entrée de la sonde dans l'atmosphère martienne (le ). Il était prévu que l'atterrisseur envoie les premières données par radio 20 minutes après l'atterrissage. Mais le contrôle au sol ne reçoit aucun signal à l'heure prévue. Aucune émission radio en provenance des pénétrateurs n'est également reçue. Le radiotélescope de 45 mètres de diamètre de l'Université de Stanford, celui de Westerbork aux Pays-Bas, Joddrell Bank au Royaume-Uni et Medicina en Italie sont mobilisés pour tenter de capter un éventuel signal de faible puissance en vain. Après plusieurs jours d'écoute sans résultat, la NASA annonce officiellement que la sonde spatiale est perdue. L'orbiteur Mars Global Surveyor réalise le une série de photos couvrant le site d'atterrissage sur une superficie de 300 km2 avec une résolution spatiale de 1,5 mètre par pixel. Les images réalisées ne permettent d'identifier ni l'atterrisseur (deux pixels) ni le parachute (quatre pixels)[30].
Résultats de l'enquête sur la perte de la sonde spatiale[modifier | modifier le code]
Une enquête est menée par les ingénieurs de la NASA pour déterminer l'origine de la perte de Mars Polar Lander et des deux pénétrateurs. Malheureusement, il avait été décidé au début du projet pour des raisons financières qu'aucune télémesure ne serait transmise par la sonde spatiale durant la phase de descente vers le sol. Cette décision avait été prise alors que l'enquête menée après la perte de la sonde spatiale Mars Observer (1992) avait conclu qu'il était nécessaire de transmettre en temps réel les données sur l'état de la sonde spatiale durant les phases critiques de la mission. Une des premières recommandations faites par la commission d'enquête sera d'imposer cette transmission pour les missions suivantes. Parmi les hypothèses émises quant à l'origine de la perte de Mars Polar Lander figurent l'atterrissage sur un terrain comportant des obstacles trop importants, une défaillance du bouclier thermique durant la rentrée atmosphérique due à une erreur de fabrication, des erreurs de conception dans le logiciel de contrôle de la phase de descente, un déséquilibre de l'atterrisseur provoqué par une modification de la position du centre de masse durant la phase de propulsion et un mauvais fonctionnement des rétrofusées. Ces dernières étaient dérivées de moteurs-fusées utilisés par l'étage porteur des têtes nucléaires d'un missile balistique intercontinental. Elles n'avaient pas été testées dans le contexte d'une mission martienne[30].
Mais l'origine la plus probable de la défaillance est une erreur informatique dans le logiciel chargé d'éteindre les rétrofusées au moment où l'atterrisseur touchait le sol. Le programme utilisait des données fournies par des capteurs pour déterminer que Mars Polar Lander s'était posé. Durant des tests, les techniciens avaient découvert que le déploiement des pieds effectué environ 40 mètres au-dessus du sol produisait une secousse qui pouvait induire en erreur le logiciel et entraîner un arrêt prématuré des rétrofusées. L'atterrisseur serait alors tombé en chute libre et aurait touché le sol avec une vitesse verticale de 80 km/h qui aurait mis fin à la mission. Cette sensibilité des capteurs avait été identifiée mais le cahier des charges fourni pour le développement du logiciel n'avait pas indiqué de manière explicite que celui-ci devait filtrer ce type d'événement[30].
En ce qui concerne les pénétrateurs, les enquêteurs ne disposent également d'aucune télémesure susceptible de les mettre sur la piste de l'origine de leur défaillance. Plusieurs hypothèses sont avancées. Les pénétrateurs ont pu percuter une surface recouverte de glace qui, aux basses températures des régions polaires, est aussi dure que de la roche. N'étant pas conçus pour pénétrer dans ce type de matériau, ils auraient rebondi et auraient été détruits. La deuxième hypothèse est une défaillance de l'émetteur radio ou des batteries au moment de l'impact car ceux-ci n'auraient pas été testés suffisamment. L'antenne radio souple aurait pu se décharger électriquement dans l'atmosphère ténue de Mars comme ce fut le cas, 30 ans auparavant, pour l'atterrisseur soviétique Mars 3. Les autres hypothèses sont une incidence trop rasante au moment de l'impact, des dommages produits au moment de la fragmentation du bouclier thermique et la rupture de l'antenne radio. De manière générale, la commission d'enquête estime que les tests effectués sur les pénétrateurs n'avaient pas été testés suffisamment pour pouvoir être prêts pour une mission[31].
Conséquences de la perte des missions Surveyor 98[modifier | modifier le code]
Pas de remise en cause des missions à bas coût[modifier | modifier le code]
Cet échec se produit quelques mois après celui de Mars Climate Orbiter. La perte en quelques mois d'intervalle de trois sondes spatiales martiennes (Mars Climate Orbiter, Mars Polar Lander et Deep Space 2) est une énorme claque pour la NASA et en particulier pour l'administrateur de l'agence spatiale Daniel Goldin, promoteur du « better, faster, cheaper » (mieux, plus fréquent, moins cher). Le JPL avait par ailleurs perdu au début de l'année 1999 et peu après son lancement le télescope spatial à bas coût WIRE à la suite de la fuite de son liquide réfrigérant due à une erreur de conception. Goldin, tout en faisant des excuses publiques lors d'un déplacement au Jet Propulsion Laboratory (établissement gestionnaire du programme), décide de maintenir sa décision de favoriser les missions à faible coût pour l'exploration du Système solaire. Il confirme qu'il est exclu de revenir à la politique antérieure des missions très coûteuses. La commission d'enquête ayant souligné que le coût des missions perdues avait été dès le départ des développements été sous-évalué d'environ 30 %, Goldin annonce que désormais ces missions auront un budget adapté à leur besoin. Les missions martiennes suivantes ainsi que celles du programme Discovery permettront effectivement à cette stratégie de porter ses fruits avec une série ininterrompue de succès toutefois sans bloquer complètement le développement de missions beaucoup plus ambitieuses (Mars Science Laboratory)[31].

Annulation du programme Mars Surveyor[modifier | modifier le code]
Dans l'immédiat, la NASA décide de revoir la conception des missions Mars Surveyor et en conséquence annule le développement des sondes spatiales en cours. Seul l'orbiteur Surveyor 2001, aux caractéristiques très proches de Mars Climate Orbiter dont la conception n'a pas été remise en cause par sa perte, sera lancé en 2001 sous l'appellation Mars Odyssey. L'atterrisseur de Surveyor 2001 dont l'assemblage final doit s'achever quatre mois plus tard est quant à lui annulé. Cet engin spatial devait utiliser beaucoup plus tôt durant la descente ses rétrofusées alors de réaliser un atterrissage de précision (dans une ellipse de 10 kilomètres) Sa charge utile principale (tout comme celle de la mission Surveyor 2003) était un astromobile (rover) aux capacités très proches des rovers MER. La mission de Surveyor de 2003 incluait également un rover qui devait collecter des échantillons du sol pour une future mission chargée de les ramener sur Terre[32].
Poursuite du programme d'exploration de Mars[modifier | modifier le code]
Heureusement pour l'exploration de Mars, les données recueillies à la même époque par l'orbiteur Mars Global Surveyor démontrent que Mars n'a pas toujours été une planète aride. Les responsables de la NASA, sous la pression des scientifiques, décident de préparer une nouvelle mission double, Mars Exploration Rover (MER), transportant chacune un rover capable d'étudier in situ la géologie martienne. L'atterrisseur Phoenix (2007), quasi clone de Mars Polar Lander, lancé en 2007, atterrit près du pôle nord martien et remplit en grande partie les objectifs assignés à MPL. InSight, lancé en 2018, avec des instruments destinés à étudier la structure interne de la planète, utilise à quelques variantes près une plateforme identique à celle de MPL.
Tentatives de localisation de Mars Polar Lander[modifier | modifier le code]
À la fin de l'année 1999, puis au début de l'an 2000, la NASA tente de détecter d'éventuels débris présents à la surface de Mars, en utilisant les caméras de l'orbiteur Mars Global Surveyor (MGS). Ces tentatives échouent. À la suite de l'atterrissage des missions Mars Exploration Rover en 2004, les images prises par MGS à l'époque de la zone d'atterrissage de Mars Polar Lander sont réexaminées à l'aide des caméras de MGS. On sait désormais à quoi ressemble un engin de cette taille vu de l'espace. Les techniciens pensent avoir identifié le parachute et à 200 mètres de là un point brillant au milieu d'une tache sombre qui pourrait être l'atterrisseur[33]. Mais des images à haute résolution prises en démontrent que le parachute est en réalité le versant d'une petite colline et que le point brillant relève du bruit électronique. Le destin de Mars Polar Lander reste aujourd'hui une énigme[34].
Références[modifier | modifier le code]
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9), p. 133
- (en) NASA/JPL, « Mars Polar Lander Fact Sheet », sur Site NASA Mars Polar Lander (consulté le ).
- (en) NASA/JPL, « Quick Facts », sur Site NASA Deep Space 2 (consulté le ).
- (en) NASA/JPL, « Mars Polar Lander Science Goals », sur mars.jpl.nasa.gov, .
- Press kit : 1998 Mars mission launch, p. 31
- (en) Philippe Labrot, « Mars Surveyor 98 », sur De la planète rouge à l'origine de la vie (nirgal.net), .
- Press kit : 1998 Mars mission launch, p. 28-30
- Robotic exploration of the solar system - Part 4 : the Modern Era 2004-2013, p. 242-243
- Press kit : 1998 Mars mission launch, p. 7
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 296-298
- Press kit : 1998 Mars mission launch, p. 6
- Press kit : 1998 Mars mission launch, p. 48-50
- (en) « Mars Polar LanderSpacecraft Description », sur Site de la mission Mars Polar Lander, NASA (consulté le ).
- (en) NASA/JPL, « Mars Volatiles and Climate Surveyor (MVACS) », sur mars.jpl.nasa.gov, .
- (en) « https://mars.nasa.gov/msp98/mvacs/instruments/ra.html », sur Site de la mission Mars Polar Lander, NASA (consulté le ).
- (en) « Surface Stereo Imager (SSI) », sur Site de la mission Mars Polar Lander, NASA (consulté le ).
- (en) M.T. Lemmon, « SSI/RAC: Imagers for Mars Polar Lander » [PDF], Université d'Arizona, .
- (en) W.V. Boynton, « The Thermal and Evolved Gaz Analyser (TEGA) on the Mars Polar Lander » [PDF], Université d'Arizona, .
- (en) « Thermal and Evolved Gas Analyzer (TEGA) », sur Site de la mission Mars Polar Lander, NASA (consulté le ).
- (en) « The Mars Polar Lander Mars Descent Imager (MARDI) Experiment », Malin Space Science Systems (consulté le ).
- Press kit : Phoenix Launch Mission to the Martian Polar North, p. 52
- (en) « Mars Polar Lander Mars Descent Imager (MARDI) Technical Details », sur Site de la mission Mars Polar Lander, NASA (consulté le ).
- Press kit : Phoenix Launch Mission to the Martian Polar North, p. 51
- (en) « Meterological Package (MET) », sur Site de la mission Mars Polar Lander, NASA (consulté le ).
- (en) « https://mars.nasa.gov/msp98/lidar/ », sur Site de la mission Mars Polar Lander, NASA (consulté le ).
- (en) « The Mars Microphone », sur Mars Polar Lander, Jet Propulsion Laboratory (consulté le ).
- (en) « Lander to listen for the sounds of Mars », CNN, .
- Press kit : Phoenix Launch Mission to the Martian Polar North, p. 55-56
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 304-305
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 305-306
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 306
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 307-309
- (en) « Mars Polar Lander Found at Last ? », sur Sky and Telescope, Sky and Telescope, .
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 307
Bibliographie[modifier | modifier le code]
- Dossiers de presse de la NASA sur la mission
- (en) NASA, Press kit : 1998 Mars mission launch, NASA, (lire en ligne)Dossier de presse de la NASA pour le lancement des deux missions martiennes de 1998.
- (en) NASA, Press kit : Mars Polar Lander/ Deep Space 2, NASA, (lire en ligne)Dossier de presse de la NASA pour l'atterrissage sur Mars de Mars Polar Lander.
- Résultats de l'enquête sur la perte des missions Surveyor 98
- (en) NASA, Report on the Loss of the Mars Polar Lander and Deep Space 2 mission, NASA, (lire en ligne), p. 178Rapport d'enquête sur la perte de Mars Polar Lander et Deep Space 2.
- (en) NASA, Mars Program Independent Assessment Team Report, NASA, (lire en ligne), p. 65Rapport sur le programme d'exploration de Mars à la suite de la perte des deux missions Surveyor 98.
- Autres
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, Springer Praxis, , 529 p. (ISBN 978-0-387-09627-8, lire en ligne)Description détaillée des missions (contexte, objectifs, description technique, déroulement, résultats) des sondes spatiales lancées entre 1997 et 2003.
- (en) Peter J. Westwick, Into the black : JPL and the American space program, 1976-2004, New Haven, Yale University Press, , 413 p. (ISBN 978-0-300-11075-3) — Histoire du Jet Propulsion Laboratory entre 1976 et 2004
- (en) Erik M. Conway, Exploration and engineering : the Jet propulsion laboratory and the quest for Mars, Baltimore, Johns Hopkins University Press, , 418 p. (ISBN 978-1-4214-1605-2, lire en ligne) — Histoire du programme d'exploration martien du Jet Propulsion Laboratory
Voir aussi[modifier | modifier le code]
Articles connexes[modifier | modifier le code]
Liens externes[modifier | modifier le code]
- (en) Le site officiel de la NASA consacré à la mission Mars Polar Lander
- (en) Site officiel du projet Deep Space 2
- (fr) Description de la mission Mars Polar Lander sur le site Nirgal.net de Philippe Labrot.

