
 French
French Deutsch
DeutschDeep Space 2 — Wikipédia
Vous lisez un « bon article » labellisé en 2018.

| Organisation | |
|---|---|
| Constructeur | |
| Programme | New Millennium |
| Domaine | Engin spatial expérimental |
| Type de mission | Pénétrateur |
| Nombre d'exemplaires | 2 |
| Statut | Échec |
| Lancement | |
| Lanceur | Delta II |
| Fin de mission | |
| Identifiant COSPAR | DEEPSP2 |
| Site | www.jpl.nasa.gov/nmp/ds2 |
| Masse au lancement | 3,57 kg |
|---|
Deep Space 2, abrégé en DS2, est une mission spatiale expérimentale de l'agence spatiale américaine, la NASA. Cette deuxième mission du programme New Millennium est lancée en 1999. Elle comprend deux micro-sondes spatiales identiques de type pénétrateur d'une masse unitaire de 3,57 kilogrammes qui devaient constituer le premier test d'un engin spatial de cette nature. Cette nouvelle technologie devait permettre, à terme, de déployer à bas coût un réseau de capteurs à la surface des planètes pour recueillir des données principalement sismiques et météorologiques. Le développement du programme New Millennium s'inscrit à l'époque dans la nouvelle stratégie de la NASA faster, cheaper, better (« plus vite, moins cher, meilleur » en anglais) qui privilégie les missions interplanétaires ciblées, à faible coût et avec un cycle de développement très court.
Passagères de la sonde spatiale Mars Polar Lander lancée le , les deux micro-sondes sont larguées par leur vaisseau porteur durant son approche finale de la planète Mars le 3 décembre de la même année. Après avoir traversé l'atmosphère martienne sans dispositif de freinage (parachute ou rétrofusée), elles devaient pénétrer à grande vitesse (environ 190 mètres par seconde) dans le sol du pôle sud de la planète et s'enfoncer à une profondeur d'environ 60 centimètres. Des instruments placés dans la partie inférieure détachable de la mini-sonde devaient mesurer la conductivité thermique et la dureté du sol et détecter la présence éventuelle d'eau.
Les deux pénétrateurs largués par Mars Polar Lander ne donnèrent aucun signe de vie après leur largage. La commission chargée d'enquêter sur la fin prématurée de la mission émit plusieurs hypothèses sur l'origine de leur défaillance soulignant toutes l'insuffisance des tests effectués pour la mise au point de ce nouveau type d'engin. La perte simultanée de Mars Polar Lander et, quelques mois plus tôt, celle de Mars Climate Orbiter ont contribué à faire évoluer la politique du faster, cheaper, better en prenant mieux en compte les coûts permettant la réduction des risques d'échec des missions.
Contexte : le programme New Millennium[modifier | modifier le code]

Le programme New Millennium (NMP) s'inscrit dans la nouvelle stratégie d'exploration du système solaire de la NASA mise en place par son administrateur Daniel Goldin au début des années 1990. Il s'agit de développer des missions moins coûteuses que par le passé mais de ce fait plus nombreuses et développées plus rapidement : le slogan associé est faster, cheaper, better (en français « plus vite, moins cher, meilleur »)[Note 1]. Mais ce changement a des répercussions sur la mise au point des nouvelles technologies spatiales. Celles-ci étaient testées jusque-là dans le cadre des missions opérationnelles en profitant de leurs budgets très importants : ainsi l'utilisation de mémoires flash avait été testée pour la première fois par la mission Cassini. Cette option n'est plus envisageable dans le cadre des nouvelles missions, qui imposent pour limiter les coûts, d'utiliser des technologies parfaitement rodées. Pourtant ces missions nécessitent la mise au point de nouvelles technologies spatiales permettant la miniaturisation, la réduction des coûts et l'amélioration des performances. Pour gérer ce besoin Charles Elachi, directeur du Jet Propulsion Laboratory (JPL), établissement de la NASA, propose à Goldin, un nouveau programme rassemblant des missions développées dans l'esprit du faster, cheaper, better consacrées à la qualification de ces nouvelles techniques avant leur déploiement sur des missions opérationnelles. Parmi ces technologies figurent la propulsion ionique et la réalisation de sondes spatiales de type pénétrateur. Les objectifs principaux des missions de ce programme sont donc avant tout d'ordre technique, les retombées scientifiques constituant un objectif secondaire. En , le Congrès américain donne son accord pour le lancement du programme New Millennium. La gestion du programme est confiée au JPL dont la vocation principale, depuis la création de la NASA, est le développement des missions interplanétaires. Le premier projet du programme lancé en 1998 est Deep Space 1 dont l'objectif principal est de valider le recours à la propulsion ionique pour des missions interplanétaires[1].
La mission Deep Space 2[modifier | modifier le code]
Deep Space 2 est la deuxième mission du programme New Millennium. Elle comprend deux petites sondes spatiales de quelques kilogrammes de type pénétrateur. Le chef de projet de la mission est Sarah Gavit et le responsable des expériences scientifiques est Suzanne Smrekar. Toutes deux font partie du Jet Propulsion Laboratory[2].
Les sondes spatiales de type pénétrateur[modifier | modifier le code]
Un pénétrateur est un engin équipé d'instruments de mesure et conçu pour être largué en altitude : dépourvu de dispositif permettant de réduire sa vitesse, il s'enfonce dans le sol afin de recueillir des données. Le concept est testé pour la première fois par l'Armée américaine dans les années 1970. Largués d'un avion, ces pénétrateurs militaires étaient équipés de sismomètres ou d'autres instruments dans le but de détecter les mouvements de troupe[3]. Dans le contexte d'une mission spatiale, un pénétrateur permet théoriquement de disposer des instruments à la surface d'une planète sans avoir recours aux dispositifs complexes habituels qu'impose un atterrissage en douceur : parachute, rétrofusée, système de contrôle d'attitude, radar, train d'atterrissage… La taille de la sonde spatiale est fortement réduite ce qui influe positivement sur son coût. La légèreté et le faible coût d'un pénétrateur permettent théoriquement de déployer un grand nombre d'engins spatiaux à la surface de la planète et ainsi de disposer de plusieurs stations de mesure ce qui facilite l'étude des processus météorologiques ou l'analyse des ondes sismiques. Des projets comme MESUR, MetNet ou NetLander (tous non aboutis en 2018) reposent sur ce concept. Compte tenu des capacités réduites du pénétrateur, un vaisseau porteur, ayant ses propres objectifs, peut être utilisé pour prendre en charge le transit entre la Terre et la planète à étudier. La première mise en œuvre d'un pénétrateur dans le domaine spatial est développée dans le cadre de la mission russe Mars 96. Les pénétrateurs de Mars 96 sont longs de 2 mètres pour un diamètre de 17 centimètres et ont une masse de 125 kilogrammes. Malheureusement la sonde spatiale est détruite dès son lancement. L'agence spatiale japonaise développe à la même époque que Deep Space 2 la mission Lunar-A qui emporte également des pénétrateurs de 12 à 13 kilogrammes. Ceux-ci doivent être largués depuis l'orbite et pénétrer dans le sol lunaire à une vitesse de 300 mètres par seconde. Mais la mission, dont le lancement était planifié initialement en 2002, est annulée en 2007 pour des raisons budgétaires[4].
-
 Dans le sens des aiguilles d'une montre les différents modèles de pénétrateur testés ayant abouti à la forme adoptée par Deep Space 2.
Dans le sens des aiguilles d'une montre les différents modèles de pénétrateur testés ayant abouti à la forme adoptée par Deep Space 2. -
 Les deux sondes Deep Space 2 sont visibles de part et d'autre de l'étage de croisière de Mars Polar Lander sur cette photographie incluant le bouclier thermique arrière.
Les deux sondes Deep Space 2 sont visibles de part et d'autre de l'étage de croisière de Mars Polar Lander sur cette photographie incluant le bouclier thermique arrière.


Déroulement du projet[modifier | modifier le code]


Initialement, le projet Deep Space 2 a pour objectif de déposer des sismomètres à la surface de Mars au niveau des latitudes équatoriales. Le projet évolue lorsque les responsables décident d'utiliser la sonde spatiale Mars Polar Lander (MPL) comme vaisseau porteur. Les deux micro-sondes doivent être larguées par cette sonde spatiale juste avant sa rentrée atmosphérique et pénétrer dans l'atmosphère de Mars en suivant des trajectoires individuelles. MPL, qui est un atterrisseur, doit se poser près du pôle sud et les pénétrateurs, qui ne disposent d'aucune autonomie pour modifier leur trajectoire, sont contraints d'opter pour la même destination. Mais les températures rencontrées au niveau des régions polaires réduisent fortement la durée de vie des batteries qui sont la seule source d'énergie dont disposent les micro-sondes. Dans ces conditions, les relevés effectués par un sismomètre se feraient sur une trop courte période pour apporter une contribution scientifique significative. Les responsables du projet sont contraints de remplacer le sismomètre par une nouvelle charge utile dont l'objectif sera d'analyser les éléments volatiles présents dans le sol : il s'agit de confirmer la présence d'eau à la surface, hypothèse vraisemblable compte tenu de la latitude visée. La durée de vie des micro-sondes au sol est limitée à quelques heures[5].
Le projet Deep Space 2 doit faire face à de nombreuses difficultés durant sa mise au point car le volume et la masse sont fortement réduits - sa masse est le centième de celle des sondes spatiales les plus petites développées à cette époque par la NASA - et à des contraintes liées aux conditions d'arrivée sur le sol (incidence, décélération). Au fur et à mesure du développement, la masse disponible pour les instruments scientifiques se réduit[5].
- pour gagner en masse et en volume, il est prévu initialement que le système de télécommunications, qui doit transmettre les données vers la Terre en utilisant comme relais l'orbiteur martien Mars Global Surveyor, repose sur un unique circuit hybride mais des difficultés importantes de mise au point imposent de renoncer à cette solution. 12 mois avant le lancement de Deep Space 2, l'équipe projet doit remplacer ce circuit par une carte électronique classique à la fois plus volumineuse et consommant plus d'énergie. Pour respecter la contrainte de masse, il faut abandonner le capteur de pression, un des instruments scientifiques initialement prévus[6].
- le pénétrateur atteint le sol martien avec une vitesse d'environ 200 mètres par seconde (environ 650 kilomètres par heure). Ses composants électroniques et ses batteries doivent en conséquence survivre à une décélération de 60 000 g. Pour le vérifier, des tests d'impact très laborieux sont effectués : les composants électroniques sont introduits dans des projectiles qui sont tirés dans le sol à l'aide de canons à air. Les résultats sont dépouillés en laboratoire. Les composants utilisés pour les batteries, sélectionnés pour leur résistance au froid, ont tendance à exploser au moment de l'impact[7].
- la sonde spatiale est composée de deux parties qui se séparent au moment de l'impact et qui sont reliées entre elles par un câble ombilical plat permettant la transmission d'énergie et de données. Il faut de nombreux essais pour mettre au point la forme de la partie arrière qui doit rester à la surface (elle porte l'équipement radio utilisé pour communiquer avec la Terre). Il faut que celle-ci ne s'enfonce pas de plus de 10 centimètres dans le sol ou qu'elle ne rebondisse pas. Les tests effectués sont incomplets car ils ne permettent pas de valider la résistance à l'impact sur tous les types de terrain susceptibles d'être rencontrés sur Mars[8].
- le volume occupé par le câble ombilical d'une longueur initiale de 2 mètres est trop important[Note 2]. Les tests d'impact ayant démontré que la partie avant de la sonde ne s'est enfoncée qu'à une seule reprise (sur 50 tests) à plus d'un mètre de profondeur, le câble est raccourci à 1 mètre[9].
- la mise au point de batteries capables à la fois de fonctionner par une température de −78 °C et de résister à une décélération de 60 000 g est une des principales difficultés rencontrées par le projet compte tenu du caractère explosif des composants utilisés.
L'équipe projet doit renoncer à effectuer l'intégralité des tests envisagés. Elle n'a ainsi jamais pu effectuer un test d'impact avec un pénétrateur complet et opérationnel et n'a donc pas pu vérifier que celui-ci fonctionnerait après l'impact. L'équipe projet n'a pas non plus pu tester le fonctionnement des communications entre l'émetteur radio du pénétrateur et celui embarqué sur l'orbiteur Mars Global Surveyor[Note 3].
Il est prévu que les micro-sondes arrivent au sol en maintenant leur orientation de manière complètement passive la pointe vers l'avant et avec l'axe ne s'écartant pas de plus de 10° de la verticale. Des tests sont effectués dans la soufflerie supersonique (jusqu'à Mach 3) et le tunnel hypersonique (Mach 5) du Jet Propulsion Laboratory. Pour les tests en vitesse subsonique, l'équipe projet utilise les installations de l'institut de recherche aérospatial russe TsNIIMash à Kaliningrad qui permettent de reproduire les caractéristiques de l'atmosphère martienne[10].
Le coût de développement de Deep Space 2 est de 26,5 millions USD $ auxquels s'ajoutent 2 millions USD $ pour la phase opérationnelle et 1,2 million USD $ pour la mise au point des interfaces avec la sonde spatiale porteuse Mars Polar Lander[11]. Les deux sondes spatiales développées sont baptisées « Scott » et « Amundsen » en l'honneur des premiers explorateurs à atteindre le pôle sud terrestre Robert Falcon Scott et Roald Amundsen[12].
Objectifs[modifier | modifier le code]
L'objectif principal de la mission est de tester les technologies qui permettront, dans le cadre de futures missions, de déployer un réseau de sondes miniaturisées à faible coût dans le but de créer un réseau de capteurs à la surface d'une planète. La solution du pénétrateur doit permettre de réduire le coût du déploiement d'un aussi grand nombre d'engins spatiaux. Dans ce contexte, la mission Deep Space 2 doit permettre de valider les différentes techniques utilisées pour y parvenir[13] :
- véhicule de rentrée atmosphérique complètement passif (sans système de contrôle d'attitude) ;
- composants électroniques avec une intégration poussée et capables de résister à la fois à des températures extrêmement basses et à de forte décélérations (60 000 g) ;
- techniques de collecte de données sous la surface du sol.
Sur le plan scientifique, l'objectif est de déterminer si de la glace d'eau est présente sous la surface de Mars et d'évaluer les caractéristiques thermiques des couches superficielles du sol. Un objectif secondaire est de contribuer à la détermination de la densité de l'atmosphère et de mesurer la dureté du sol et si possible d'identifier la présence de strates superficielles d'une épaisseur comprise entre quelques centimètres et quelques décimètres)[13].
-
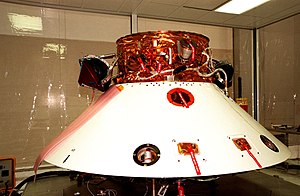
 Sur cette photographie, les étriers qui solidarisent la micro-sonde avec Mars Polar Lander sont visibles (le capuchon rouge est une protection qui ne fait pas partie de la sonde spatiale).
Sur cette photographie, les étriers qui solidarisent la micro-sonde avec Mars Polar Lander sont visibles (le capuchon rouge est une protection qui ne fait pas partie de la sonde spatiale). -
 Le module de descente de Deep Space 2 comprend une partie avant conique et une partie arrière sphérique.
Le module de descente de Deep Space 2 comprend une partie avant conique et une partie arrière sphérique. -
 La sonde spatiale n'occupe qu'une faible partie du volume dans la partie avant du module de descente dans le but de maintenir l'orientation souhaitée durant la descente.
La sonde spatiale n'occupe qu'une faible partie du volume dans la partie avant du module de descente dans le but de maintenir l'orientation souhaitée durant la descente.



Caractéristiques techniques[modifier | modifier le code]

Les deux pénétrateurs sont identiques. Chaque pénétrateur comprend un module de descente et, à l'intérieur de celui-ci, la sonde spatiale proprement dite qui comprend deux parties : une partie supérieure qui ne s'enfonce pas entièrement dans le sol et une partie inférieure en forme d'obus qui s'enfonce jusqu'à 1 mètre dans le sol et emporte des instruments destinés à analyser celui-ci.
Module de descente[modifier | modifier le code]
Le module de descente a la taille d'un ballon de basket-ball (27,5 cm de haut pour un diamètre de 35 cm[14]) et est chargé de protéger la sonde spatiale de la température élevée qu'elle subit lors de la rentrée atmosphérique. La forme du module de descente joue un rôle central dans la stabilité de la sonde spatiale. Pour remplir sa mission, la sonde spatiale doit maintenir la face appropriée (face conique) pointée vers l'avant et à l'atterrissage son axe doit faire un angle de 10° par rapport à la verticale. Ces conditions doivent être remplies en dépit des contraintes suivantes[15] :
- la sonde est larguée par le vaisseau mère avec une orientation qui selon toute probabilité n'est pas celle souhaitée (éjection latérale) ;
- elle ne bénéficie d'aucun système de stabilisation actif (mise en rotation, propulseurs) ;
- contrairement aux sondes martiennes développées jusque là, la phase finale de la descente n'est pas propulsée et elle doit conserver son orientation de manière passive jusqu'au sol, donc en régime subsonique, alors que celui-ci est générateur d'instabilités.
Pour faire face à toutes ces contraintes, la partie avant du module de descente a la forme d'un cône avec un demi-angle de 45° au lieu des 70° habituels, ce qui réduit le coefficient de trainée tandis que de manière plus classique, la partie arrière est une portion de sphère. La deuxième caractéristique retenue pour faire face à ces contraintes est l'abaissement du centre de masse qui est situé très en avant. Pour y parvenir, la sonde spatiale proprement dit occupe uniquement la partie avant du module de descente tandis que la partie inférieure de la sonde spatiale qui s'enfonce dans le sol est encastrée dans la partie supérieure pour réduire la hauteur[15].
La structure du module de descente est une coque réalisée en carbure de silicium de 0,8 millimètre d'épaisseur. La partie située à l'avant (blanche), qui subit la plus forte élévation de température est protégée par une couche d'un matériau riche en silicium et poreux baptisé SIRCA-SPLIT (Silicon-Impregnated Reusable Ceramic Ablator - Secondary Polymer Layer-Impregnated Technique) dont l'épaisseur atteint 1 centimètre au niveau du nez (le plus exposé) et qui peut résister à une température de 2 000 °C tout en maintenant la partie interne à une température de l'ordre de −40 °C. La partie arrière, moins exposée, est protégée par une couche de FRCI (fibrous refractory composite insulation). La sonde spatiale est fixée au module de descente par trois pattes en titane. Le module de descente a une masse de 1,2 kilogramme[16].
Partie supérieure du pénétrateur[modifier | modifier le code]
La partie supérieure de la sonde spatiale a approximativement la forme d'un cylindre haut de 10,5 centimètres pour un diamètre de 13,6 centimètres et pèse 1,737 kilogramme[14]. Elle comprend un émetteur radio doté d'une antenne longue de 12,7 centimètre et fonctionnant en bande S qui transmet les données vers la Terre avec un débit de 8 kilobits par seconde. Une batterie au lithium et au chlorure de thionyle d'une capacité de 600 milliampères-heure alimente l'émetteur radio ainsi que les autres équipements donc ceux installés dans la partie inférieure de la sonde spatiale. Le type de batterie utilisé présente la particularité de fonctionner par grand froid (−80 °C). La batterie, d'une masse de 200 grammes, comprend huit éléments de format D. Cette partie de la sonde spatiale comprend également un accéléromètre qui recueille des données dans un objectif scientifique et un capteur solaire[17],[18].
Partie inférieure du pénétrateur[modifier | modifier le code]
La partie inférieure de la sonde spatiale a la forme d'un obus long de 10,6 centimètres pour un diamètre de 3,9 centimètres et pèse 670 grammes[14]. Elle est reliée à la précédente par un câble. Elle comprend un accéléromètre, des capteurs de température, un système de prélèvement d'échantillon du sol et un système d'analyse de l'échantillon qui doit identifier la présence d'eau[19]. Un microcontrôleur gère le déroulement des opérations en utilisant un microprocesseur 80C51 disposant de 128 kilooctets de mémoire vive et de 128 kilooctets de mémoire morte reprogrammable de type EEPROM ainsi que des interfaces vers les systèmes analogiques[20].
-
 Les deux parties de la sonde spatiale et le câble les reliant.
Les deux parties de la sonde spatiale et le câble les reliant. -
 Fonctionnement de la sonde spatiale.
Fonctionnement de la sonde spatiale. -
 Le microcontrôleur situé dans la partie inférieure de la sonde spatiale pilote le déroulement des opérations de prélèvement et d'analyse d'échantillon.
Le microcontrôleur situé dans la partie inférieure de la sonde spatiale pilote le déroulement des opérations de prélèvement et d'analyse d'échantillon.



Instruments scientifiques[modifier | modifier le code]

Chacune des deux sondes spatiales emporte quatre petits instruments. Ceux-ci ont essentiellement pour objectif de démontrer que des mesures scientifiques valables peuvent être effectuées à l'aide d'un engin de type pénétrateur malgré sa taille et la brutalité de sa prise de contact avec le sol. Quatre instruments sont embarqués[21].
- la sonde spatiale emporte un accéléromètre dans la partie supérieure qui doit mesurer les changements de vitesse à partir de 75 kilomètres au-dessus du sol jusqu'à l'impact au sol. La sensibilité est de 38 millig et des mesures sont prises avec une fréquence de 20 hertz. Ces données doivent servir à mesurer la densité des couches de l'atmosphère traversées avec une résolution comprise entre 1 kilomètre au début de la rentrée atmosphérique et 100 mètres vers la fin de la descente[22].
- un deuxième accéléromètre situé dans la partie inférieure de la sonde spatiale doit mesurer la décélération lors de l'impact avec le sol et la pénétration de cette partie de la sonde dans le sol. L'instrument permet de mesurer une accélération comprise entre 10 000 et 30 000 g avec une précision de 10 g. Les mesures sont effectuées avec une fréquence de 25 kilohertz. Cet instrument doit contribuer à identifier la nature du sol traversé[23].
- la microsonde emporte dans sa partie inférieure un système de prélèvement d'échantillon du sol. Des systèmes de prélèvements passifs (lames ou trous) ont été testés sans succès. Le système utilisé comprend une tarière de 9 millimètres de diamètre, dont la course est de 9 millimètres. Elle est mise en mouvement par un moteur électrique d'une puissance de 1 watt. L'échantillon de sol prélevé, d'une masse inférieure à 100 milligrammes, tombe dans une coupelle de 160 millimètres cubes qui est ensuite scellée et chauffée. Des thermistors mesurent l'évolution de la température, permettant d'en déduire certaines caractéristiques du sol et notamment la présence de glace d'eau. Les gaz qui s'échappent sont éclairés par un laser à diode accordable qui émet une lumière sur une bande étroite (par défaut 1,37 micromètre) dont la longueur d'onde est modifiée en faisant varier la tension d'alimentation. L'atténuation du rayonnement par le gaz est mesurée par une photodiode. La présence de pic d'extinction, lorsque la longueur d'onde appropriée est atteinte, permet d'identifier la présence d'eau. L'ensemble de cette expérience est extrêmement miniaturisée : le système de prélèvement d'échantillon occupe un volume de 11 centimètres cubes et pèse 50 grammes, l'électronique occupe 4,8 centimètres cubes et pèse 10 grammes tandis que le laser pèse 1 gramme et occupe un volume de 0,3 centimètre cube. La consommation électrique est de 1,5 watt en pointe[24],[25].
- deux capteurs de températures situés aux deux extrémités de la partie inférieure de la sonde spatiale doivent permettre de déterminer la conductivité thermique en mesurant à quelle vitesse évolue la température du sol échauffé par l'impact[26].
- Expérience de détection de l'eau
-
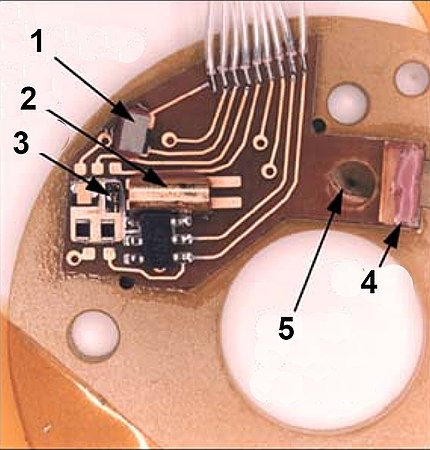 Système de détection d'eau : 1 Détecteur (photodiode) - 2 Lentille - 3 Laser - 4 Miroir - 5 Canal par lequel s'échappe le gaz.
Système de détection d'eau : 1 Détecteur (photodiode) - 2 Lentille - 3 Laser - 4 Miroir - 5 Canal par lequel s'échappe le gaz. -
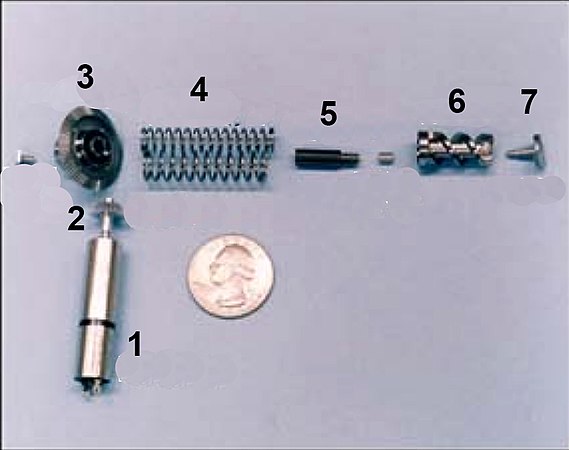 Système de prélèvement d'échantillon (masse : 50 grammes) : 1 Micro-moteur - 2 Pignon - 3 Engrenage conique - 4 Ressorts de la foreuse - 5 - 6 Tarière - 7 Pointe du foret.
Système de prélèvement d'échantillon (masse : 50 grammes) : 1 Micro-moteur - 2 Pignon - 3 Engrenage conique - 4 Ressorts de la foreuse - 5 - 6 Tarière - 7 Pointe du foret.


Déroulement de la mission[modifier | modifier le code]

Du lancement à l'arrivée sur Mars[modifier | modifier le code]
Deep Space 2 est lancée le avec la sonde spatiale Mars Polar Lander par une fusée Delta II. Les deux pénétrateurs sont attachés durant le transit entre la Terre et Mars à la partie centrale de l'étage de croisière. Les deux petits engins sont recouverts par un revêtement thermique souple qui doit les protéger du froid de l'espace. Durant cette phase de la mission, ils sont complètement passifs et aucun interface ne les connecte à l'étage de croisière. Le , cinq minutes avant que Mars Polar Lander ne pénètre dans l'atmosphère de Mars, l'étage de croisière est largué. Cette action amorce le mécanisme pyrotechnique qui doit permettre la libération des pénétrateurs. Dix-huit secondes après la séparation entre l'atterrisseur et l'étage de croisière, les petites charges explosives sont déclenchées, entraînant l'éjection des deux pénétrateurs. Simultanément, l'ordinateur embarqué à bord des petites sondes est activé et commence à vérifier l'état de la sonde. Au moment de leur largage, les pénétrateurs ne sont pas orientés correctement et ne disposent d'aucun moyen actif leur permettant de modifier cet état. Mais dans l'atmosphère qui va en s’épaississant, les petites sondes s'orientent de manière automatique, grâce à leur forme et la position de leur centre de masse, de manière que la face la mieux protégée de l'élévation de la température se place vers l'avant[27],[28].
Déroulement prévu de la descente vers le sol martien[modifier | modifier le code]
Soumis à des températures de plus de 1 600 °C, le revêtement thermique brûle et est rapidement éliminé. Le matériau ablatif du bouclier thermique doit résister à cette température. La petite sonde subit une décélération de 20 g. La vitesse de la sonde qui était d'environ 6 kilomètres par seconde au moment de son largage n'est plus que d'environ 200 mètres par seconde à l'issue de cette phase de freinage par l'atmosphère. Dépourvue de parachute ou de système propulsif, elle arrive à cette vitesse sur le sol martien sous un ange d'environ 25° par rapport à la verticale. Les deux sondes doivent toucher le sol à environ 60 kilomètres du site d'atterrissage de Mars Polar Lander tout en étant séparées l'une de l'autre de 10 kilomètres. Lorsque l'engin spatial frappe le sol, le module de descente qui entoure la sonde spatiale éclate. La partie avant du pénétrateur en forme d'obus s'enfonce dans le sol à une profondeur d'environ un mètre tandis que la partie arrière reste à la surface. Ce sous-ensemble, dont l'antenne émerge au-dessus du sol va servir de relais de communications avec la Terre via Mars Global Surveyor en orbite autour de Mars. Une petite foreuse située dans la partie avant prélève un échantillon du sol qui est ensuite analysé pour déterminer la quantité d'eau présente. Des capteurs mesurent la température du sol. Ces données sont transmises à la Terre. La mission des pénétrateurs doit s'achever environ deux heures après leur arrivée sur le sol martien mais peut être prolongée jusqu'à ce que les batteries qui fournissent l'énergie soient épuisées[29].
Perte des atterrisseurs[modifier | modifier le code]
Dans les jours suivants l'atterrissage, aucun signal émanant des émetteurs radio des pénétrateurs n'est reçu. Le contact avec Mars Polar Lander est également perdu. Après avoir tenté de reprendre contact avec les sondes spatiales en utilisant les grandes antennes paraboliques terrestres, les sondes Deep Space 2 ainsi que Mars Polar Lander sont considérées comme perdues le [30].
Résultats de l'enquête sur l'échec de la mission[modifier | modifier le code]

La commission d'enquête créée par la NASA après la perte de la mission ne dispose d'aucune télémesure susceptible d'orienter ses recherches sur l'origine de sa défaillance. De nombreuses hypothèses sont évaluées en analysant les tests effectués par l'équipe projet. Plusieurs d'entre elles sont soit complètement écartées soit considérées comme peu plausibles par la commission d'enquête : problème à la séparation des sondes avec le vaisseau porteur, mise en marche prématurée des batteries, défaillance du module de descente durant la rentrée atmosphérique, mauvaise trajectoire qui aurait éloigné le site d'atterrissage de celui prévu et aurait mis les sondes hors de portée de l'orbiteur Mars Global Surveyor (MGS), défaillance de la structure au moment de l'impact, problèmes de conception de l'émetteur ou du récepteur radio de MGS ou incompatibilité des protocoles de communication, mauvaise manipulation au sol des sondes qui aurait fragilisé le module de descente réalisé dans un matériau très sensible aux chocs, défaillance d'un des composants achetés dans le commerce. Finalement quatre sources d'anomalies possibles sont retenues qui sont toutes la conséquence de tests incomplets ou manquant de réalisme, résultant des contraintes de coût ou de temps imposées à l'équipe projet par la politique du faster, cheaper, better[31] :
- les pénétrateurs ont pu percuter soit une surface recouverte de glace (peu probable) qui, aux basses températures des régions polaires, est aussi dure que de la roche, et aurait fait rebondir la sonde spatiale, soit au contraire une couche superficielle de matériel mou (observé par l'orbiteur MGS) qui aurait amorti l'impact et aurait empêché la pénétration dans le sol. Dans les deux cas, le pénétrateur n'aurait pas été dans une position finale opérationnelle.
- l'électronique ou la batterie n'a pas résisté à l'impact. De nombreux tests ont été effectués par l'équipe projet (plus de cinquante) mais jamais dans la configuration de vol. Le dernier lot de batterie livré et finalement utilisé n'a jamais été testé, étant considéré comme qualifié du fait de caractéristiques similaires au lot précédent qui lui avait pu être testé.
- la sonde spatiale utilise une antenne radio parapluie qui lui permet d'atteindre le quart d'onde avec une longueur réduite. Mais avec ce type d'antenne, un champ électrique relativement élevé se crée à ses extrémités. Celui-ci aurait pu déclencher un processus d'ionisation dans les conditions atmosphériques particulières de Mars qui aurait fortement atténué la puissance effective de l'émetteur radio et affaibli les émissions radio. Aucun test de fonctionnement de l'émetteur radio dans des conditions reproduisant l'atmosphère martienne n'avait été effectué par l'équipe projet .
- la sonde spatiale s'est couchée sur le côté : l'antenne radio, qui n'avait pas été conçue pour fonctionner dans cette configuration, aurait émis un signal radio trop faible pour pouvoir être reçu.
Les conséquences de l'échec[modifier | modifier le code]
Cet échec mais surtout celui de l'atterrisseur Mars Polar Lander qui avait servi de vaisseau porteur et, quelques mois plus tôt, celui de Mars Climate Orbiter sont un revers cuisant pour la NASA, en particulier pour l'administrateur de l'agence spatiale Daniel Goldin, promoteur du "better, faster, cheaper" (mieux, plus fréquent, moins cher). Le JPL a par ailleurs perdu au début de l'année 1999, peu après son lancement, le petit télescope spatial infrarouge WIRE à la suite de la fuite de son liquide réfrigérant due à une erreur de conception. Goldin, tout en faisant des excuses publiques lors d'un déplacement au Jet Propulsion Laboratory (établissement gestionnaire du programme), annonce qu'il maintient sa décision de favoriser les missions à faible coût pour l'exploration du système solaire. Il confirme qu'il est exclu de revenir à la politique antérieure des missions très coûteuses. Toutefois, prenant acte des conclusions des enquêteurs qui avaient souligné le sous-financement des missions perdues évident dès le début des projets (évalué à environ 30%), Goldin annonce que désormais les missions auront un budget adapté à leurs besoins. Les missions martiennes suivantes ainsi que celles du programme Discovery permettront effectivement à cette stratégie de porter ses fruits avec une série ininterrompue de succès, sans bloquer complètement le développement de missions beaucoup plus ambitieuses (Mars Science Laboratory)[32]. De nombreux projets de pénétrateurs sont étudiés par la suite mais aucun, courant 2018, n'a dépassé le stade de l'étude.
Notes et références[modifier | modifier le code]
Notes[modifier | modifier le code]
- Pour illustrer la longueur du cycle de développement des missions interplanétaires lourdes : la conception de la mission Cassini Huygens débute au cours de la décennie 1980, elle est lancée en 1997, elle atteint son objectif (la planète Saturne) en 2004 et elle s'est achevée en 2017. La conception de la sonde spatiale Galileo débute en 1975 mais elle est lancée en 1989 soit 14 ans plus tard.
- Un revêtement déposé sur le câble pour assurer son isolation se révèle cassant et ne permet pas d'enrouler le câble de manière trop serrée.
- L'émetteur de l'orbiteur Mars Global Surveyor fourni par l'agence spatiale française, le CNES, avait été conçu pour collecter les données envoyées par le ballon qui devait être largué dans l'atmosphère martienne par la sonde spatiale russe Mars 96.
Références[modifier | modifier le code]
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 196.
- Press kit : Mars Polar Lander/ Deep Space 2, p. 47.
- Deep Space 2: The Mars Microprobe Mission, p. 27013.
- Planetary Landers and entry Probes, p. 238-246.
- Planetary Landers and entry Probes, p. 289.
- Planetary Landers and entry Probes, p. 292.
- Planetary Landers and entry Probes, p. 293.
- Planetary Landers and entry Probes, p. 295.
- Planetary Landers and entry Probes, p. 297.
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 300.
- (en) « Quick facts », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 301.
- (en) « Mission objectives », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- Press kit : Mars Polar Lander/Deep Space 2, p. 6.
- Planetary Landers and entry Probes, p. 290-291.
- (en) « Entry system (aeroshell) », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- (en) « Aftbody », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- (en) « Lithium Battery », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- (en) « Forebody », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- (en) « Microcontroller », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- Deep Space 2: The Mars Microprobe Mission, p. 27013-27030.
- Deep Space 2: The Mars Microprobe Mission, p. 27016-27021.
- Deep Space 2: The Mars Microprobe Mission, p. 27021-27023.
- Deep Space 2: The Mars Microprobe Mission, p. 27023-27026.
- (en) « Sample/Water Experiment », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- Deep Space 2: The Mars Microprobe Mission, p. 27026-27027.
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 304-305.
- (en) Philippe Labrot, « Deep Space 2 » (consulté le ).
- (en) « Mission events », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory (consulté le ).
- (en) « Mars Polar Lander Mission Status », sur Site Deep Space 2 (JPL), NASA/Jet Propulsion Laboratory, .
- Report on the Loss of the Mars Polar Lander and Deep Space 2 mission, p. 147-149.
- Robotic exploration of the solar system - Part 3 Wows and Woes 1997-2003, p. 306.
Bibliographie[modifier | modifier le code]
![]() : document utilisé comme source pour la rédaction de cet article.
: document utilisé comme source pour la rédaction de cet article.
- Dossier de presse de la NASA sur la mission
- (en) NASA, Press kit : Mars Polar Lander/ Deep Space 2, NASA, (lire en ligne).
 Dossier de presse fourni par la NASA pour l'insertion en orbite de Mars Polar Lander et le largage de Deep Space 2.
Dossier de presse fourni par la NASA pour l'insertion en orbite de Mars Polar Lander et le largage de Deep Space 2.
- Description de l'instrumentation scientifique
- (en) Suzanne Smrekar, David Catling et al., « Deep Space 2: The Mars Microprobe Mission », Journal of Geophysical Research, vol. 104, no E11, , p. 27013-27030 (DOI 10.1029/1999JE001073., lire en ligne).
- Résultats de l'enquête sur la perte des missions Surveyor 98
- (en) NASA, Report on the Loss of the Mars Polar Lander and Deep Space 2 mission, NASA, (lire en ligne), p. 178. Rapport d'enquête sur la perte de Mars Polar Lander et Deep Space 2.
- Autres
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, Springer Praxis, (ISBN 978-0-387-09627-8). Description détaillée des missions (contexte, objectifs, description technique, déroulement, résultats) des sondes spatiales lancées entre 1997 et 2003.
- (en) Andrew J. Ball, James R.C. Garry, Ralph D. Lorenz et Viktor V. Kerzhanovichl, Planetary Landers and entry Probes, Cambridge University Press, , 340 p. (ISBN 978-0-521-12958-9).

